Yes I am constantly writing to the RMC. I will change it to only send the command once.
1command.rmcplots (2.07 MB)
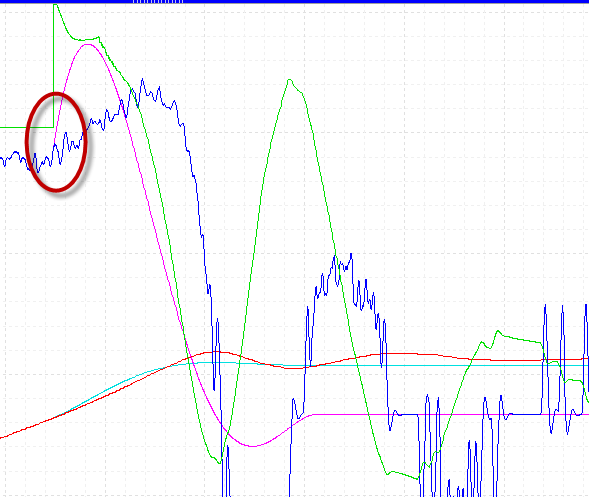
Here is the same as last only issuing each command once.
Looks a bit better. The main problem now is that when going from open loop to closed loop, the target velocity uses the current actual velocity, which is noisy, and that makes the target velocity jump up, which makes the Control Output jump up, and that causes the oscillation. What command are you using to go from open loop to closed loop? If it is the Move Absolute or similar, then increasing the commanded Accel significantly should help. That will make the Target Velocity turn around faster. Setting the Differential gain to zero may also help prevent the Control Output jump.
I am using the quick move.
Which firmware version are you using?
I’ll have to let you know in the morning. I’m home and my laptop is not letting me remote connect to it. I’m not sure how the settings got changed.
3.52.oa
I would like to get an evnet log capture and plot of the same occurence. In the Event Log properties, for that axis, turn on the Advanced Debug Target info. THat will help me figure this out.
Okay, I wish you would have ask this several hours earlier. I will go in tomorrow and do it.
advanced enabled.rmcplots (1.24 MB)
Jason don’t give up on me. I am in need.
Actually if this don’t work all other upgrades are out. I told them I could make the thing run better than ever. I will look bad and they will not buy more. Even though its a pos it ran better before the upgrade.
Oh, i was waiting for an event log. For faster and better tech support, email support@deltamotion.com. For best results, also provide event log capture, plot and project file.