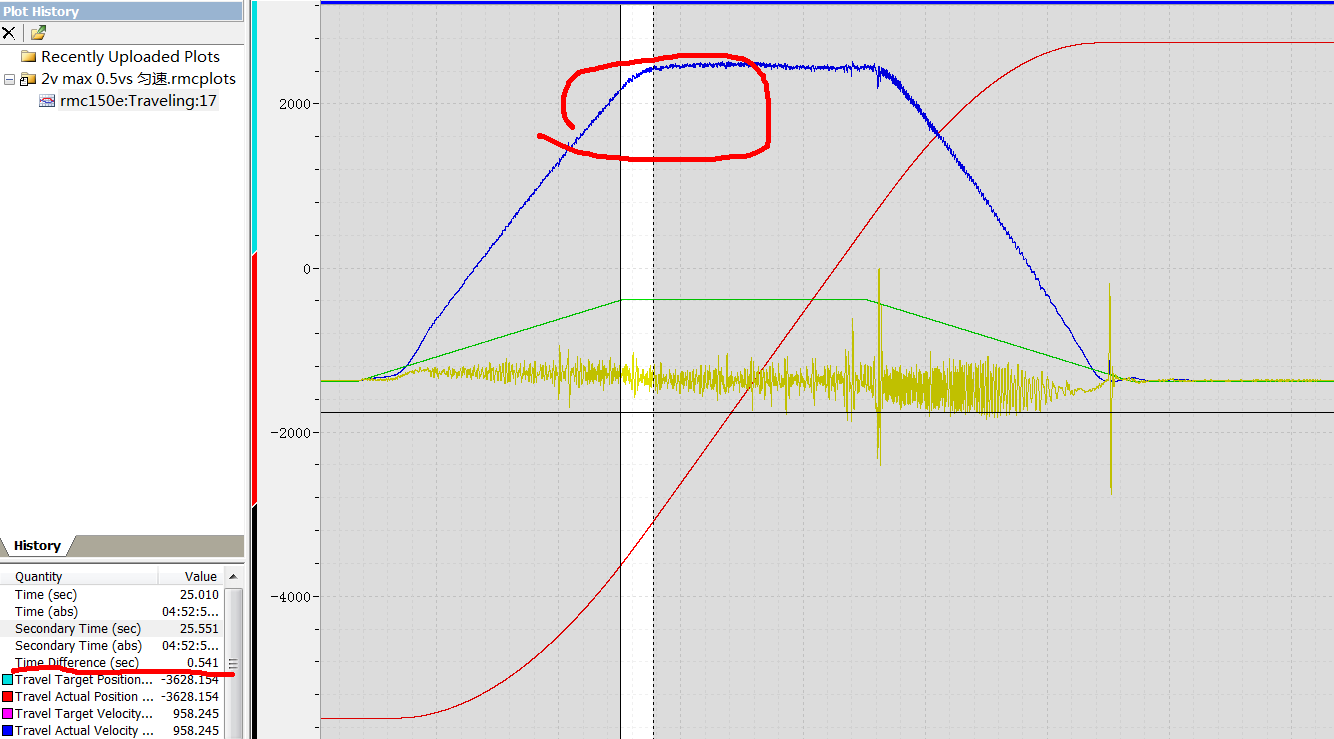
Axis Velocity curve lag the voltage curve 0.5s in the open control mode,How much impact on the electric control system in the Closed Loop Control?
lag too much,it is difficult to calculator the feedforward,Is it right?
I find it very difficult to say exactly how much the time delay will impact the motion. However, a time delay should not adversely affect the Velocity Feed Forward calculation, since the best way to calculate it is to use a constant Control Output, and give the Actual Velocity time to settle out. Therefore, the time delay is irrelevant.
With a delay of 0.5 seconds, I think this will certainly impact the motion very noticeably, but it depends on what type of motion is required. If you have slow motion and larger tolerances, then it may not be an issue.
thanks
Long distance positioning is ok,Short distance positioning is not so good
Is there a connection between this phenomenon and the lag?
There are a few possible reasons why short moves are more difficult.
-
Given identical Target Acceleration and Target Velocity, the frequency content of the Target Position for a short move is higher than that of a long move. It is more difficult to control a system when the target has higher frequencies.
-
The RMC’s target generator may use a larger Target Jerk value on very short moves, which means the Target Acceleration increases and decreases faster, which can make control more difficult. If you post some plots that include the Target Acceleration, it should be obvious whether this is the case.
-
On hydraulic cylinder, the natural frequency varies with position. A system is easier to control when the natural frequency is high. The natural frequency of a cylinder is the lowest in the middle. Long moves tend to start close to one end and end at the other end, and short moves may be anywhere in the cylinder. Therefore, short moves tend to more often occur in the area of natural frequency, and be more difficult to control. Using a lower Target Velocity can help. Or, if the valve is linear and very high-performance and the feedback has good resolution, using the Double Derivative gain may help.
-
For cases where the actual lags the target significantly, the actual will not have time to catch up to the target during a short move, which can cause problems at the end of a move. For a long move, the actual may actually catch up to the target, which may result in better control at the end of the move, although there is a chance that it just causes the integral gain to wind up, which will result in overshoot. Using the Integrator On In Position feature may help prevent overshoot.
Thanks
Is the system pressure much bigger than the driving pressure, is it related to this?
System Press=21 Mpa driving pressure=1.5Mpa
I think the difference between the two is too big for electrical control.
No, with a good valve, it shouldn’t be an issue.
Thanks
I find that
When the voltage is constant, the driving pressure is still changing,Time exceeds 500ms.
Whether this is not normal or not?
I think a good hydraulic system should not be more than 100ms at this time.
Is my understanding right?
Thanks for your reply
1:
the frequency content of the Target Position for a short move is higher than that of a long move
I still don’t understand. Can you tell me in detail
2:In general, when using the Jerk Feed Forward parameter? In the help,refer to Jerk Feed Forward is helpful in systems that can be modeled as a second-order system
What are the features of second-order ?