Regarding following Delta, Motion Control - controller and modules used,
- RMC75E (CPU) +
- AA1 (Axis Module) +
- AP2 (Exp #1)
Requirement
- RMC75E Controller to run the configured and deployed PID program independently, based on the Setpoint and limits provided via Modbus/TCP
- PID Control Loop requirement
Scaling
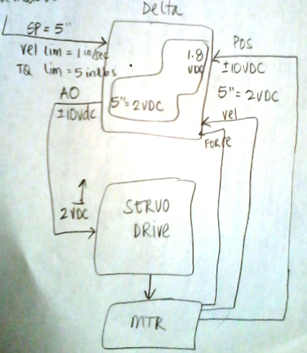
Position = 0 – 30 in
Velocity = +/- 10 in/sec
Force= 0 – 1000 lb
Following will be set via Modbus/TCP to activate the PID
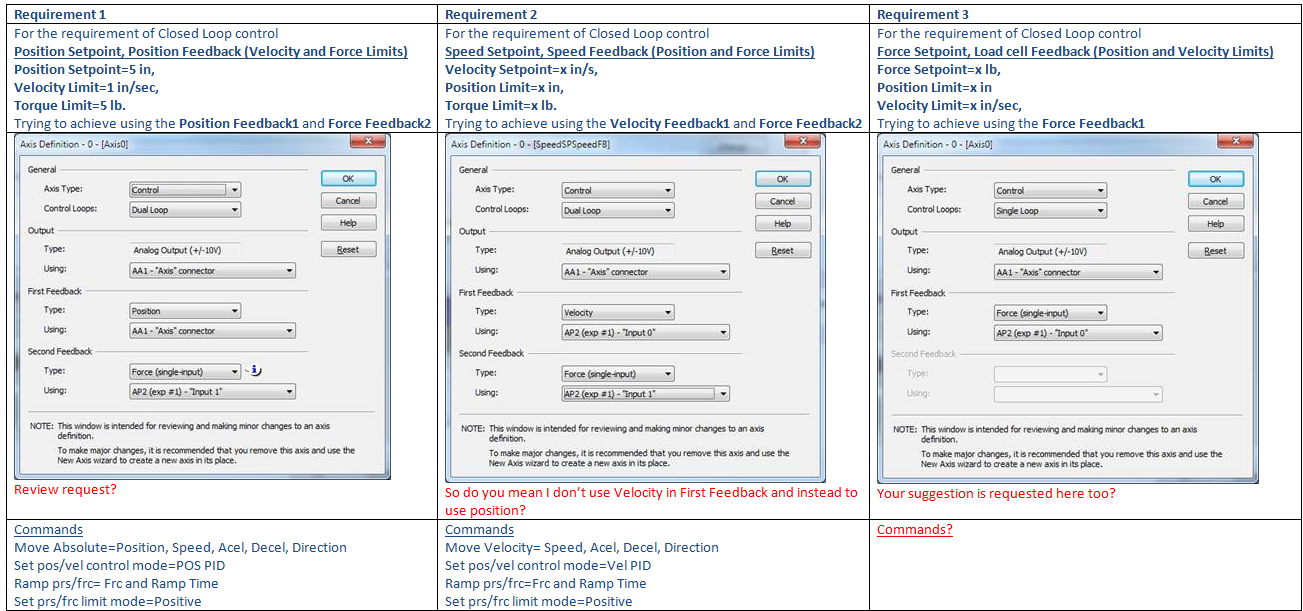
Position Setpoint= 5 in
Velocity Limit= 1 in/sec
Torque Limit= 5 lb
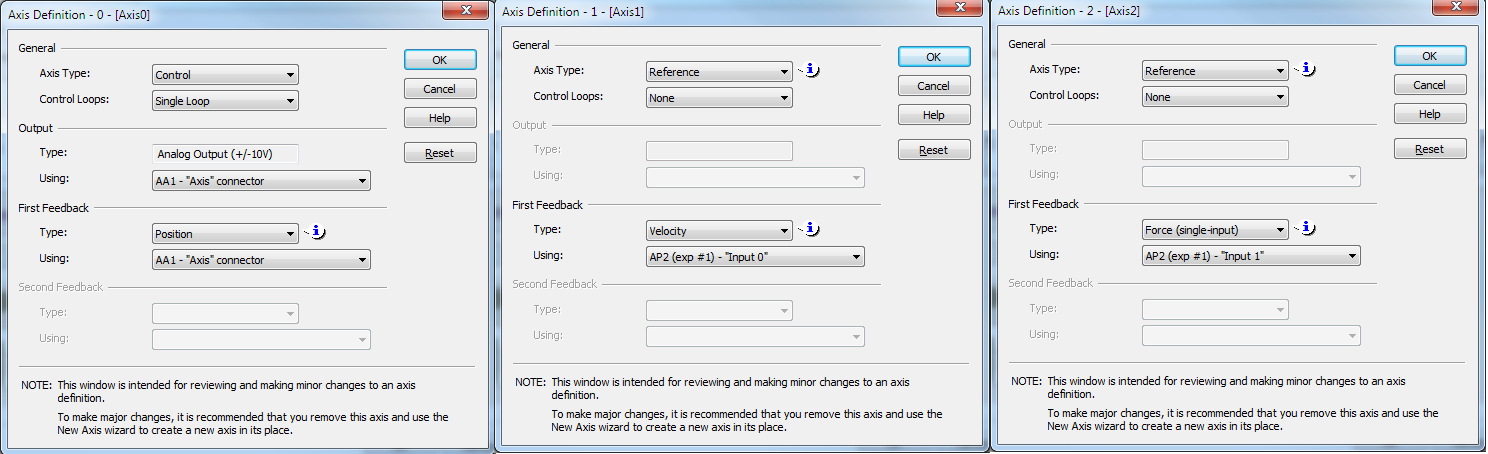
Physical channels AA1 (Axis Module) AP2 (Exp #1)
AO=AA1 - “Axis” connector
AI= AA1 - “Axis” connector………………Force Feedback
Physical channels AP2 (Exp #1)
AI= AP2 (exp#1) - “Input 0”………………Position PRIMARY Feedback
AI= AP2 (exp#1) - “Input 1”………………Velocity Feedback
Problem/Issue/Query
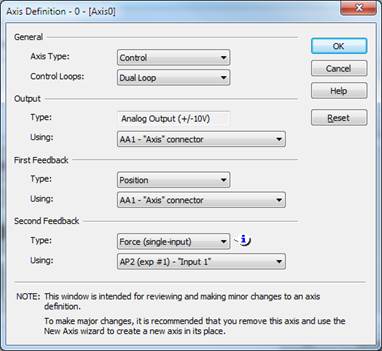
- The first and basic question for me is how do I configure the Axis Definition
Right now I have configured as below,

2. The second question as of now is whether I can communicate RMC75E connectivity through Ethernet VIA Modbus/RTU
- If you want to be able to do torque limit, delete Axis 2 and change Axis 0 to a Dual Loop axis with Force as the secondary input.
- But what if in my control loop, with,
one primary feedback as Position(in),
secondary feedback as Force(lb) (Torque Limit=5lb)
I need third channel feedback as Velocity(in) (Velocity Limit=1in/sec)?
Note: Is it like I am providing the Speed (in/s) during the time I set the Position (via Move Absolute command).
But eventhough I provide, I am NOT checking with the feedback value, as feedback value physical channel is NOT defined in the Axis Definitions?
- With primary input and secondary input
How can I use the velocity limit, can I still configure as Dual loop axis with Velocity as the secondary input.
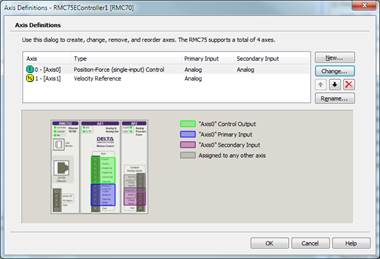
The configuration of “Axis Definitions” to define the physical feedback channel is changed as per the feedback from Delta support
The control loop is explained in proceeding email.
And now the configuration is changed to as below,
You do not need velocity feedback, even to do velocity control. We can control velocity with only position feedback in either position PID or velocity PID mode.
The velocity input on the reference axis can be used for informational purposes.
The commands you will be using are:
Move velocity
Set pos/vel control mode
Ramp prs/frc
Set prs/frc limit mode
The information in the RMCTools help file on these commands should point you in the right direction.
Velocity control with torque limit will make sure neither the torque nor velocity exceed the setpoints as long as you are in velocity PID mode.
More information on my 3 requirements, and current configuration done in 3 different projects in RMCTools,
Motion controller and Modules RMC75E + AA1 + AP2
AA1.AI Position (in)
AA1.AO PID output (V)
AP2.AI Velocity (in/sec)
AP2.AI Force (lb)