Maximum acceleration that the valve can achieve a=v/t=1000/0.044=22727mm/s2
Controlled acceleration is definitely not achieved due to the positioning。
Regardless of mechanical and electrical considerations, from hydraulic considerations,In this case, how should the theoretically controllable acceleration be calculated.
What is the relationship with the theoretical maximum acceleration?
uses ±10% positive overlap servo valve,In high-speed reciprocating motion, overlap will definitely affect the response time of the valve.
How to consider this impact in your application
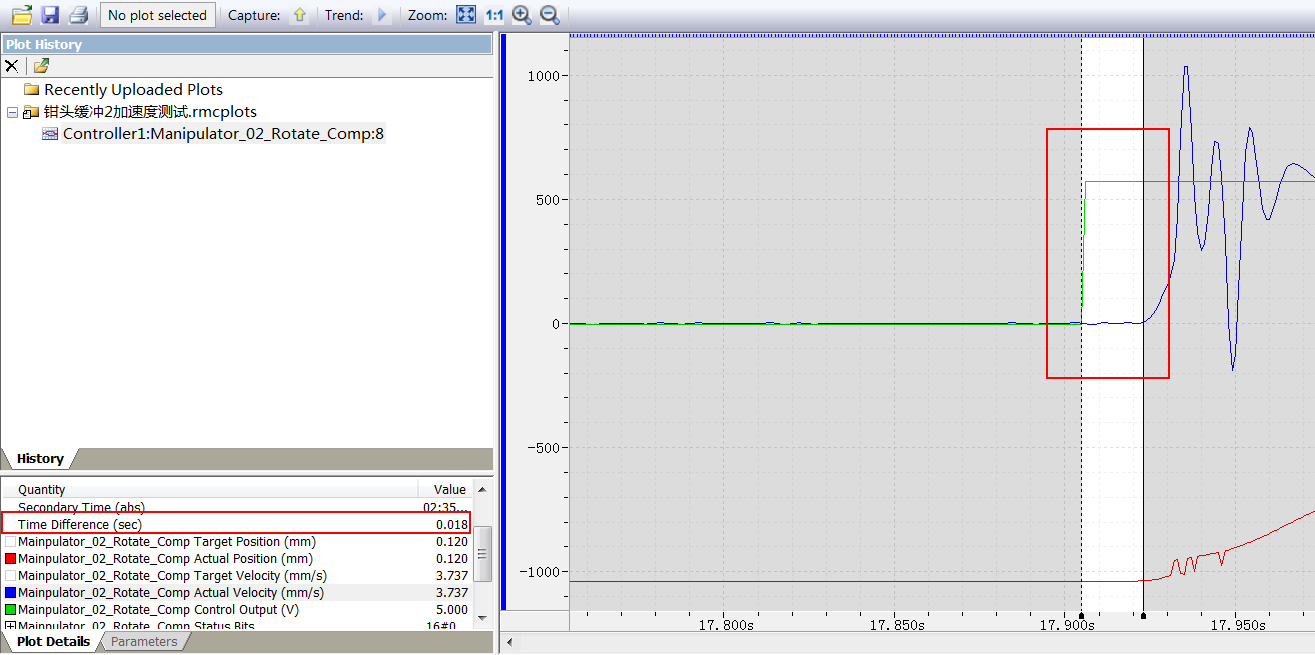
Did the following test,After the voltage is given, the cylinder will only start to operate after 18ms.
Whether this delay time is caused mainly by overlap or other factors test.rmcplots (3.54 MB)
A valve with 10% overlap is not a true servo valve. A valve with 10% overlap may work for constant velocity applications but not for systems that must accelerate and decelerate.
I can see by the plot that there is also a very large dead time in the valve. It takes many milliseconds to even start to move. The damping factor is also very low. This makes control difficult without using a good valve.
Yes, there is a limitation on how fast the actuator should be told to accelerate. The frequency of acceleration should be about 1/4 of the natural frequency of the cylinder and load. I have posted articles about this on iyeya.cn.
You really are hurting yourself by using poor valves. I know better valves will cost more but they will pay for themselves in easy of optimizing the system and performance.
Only for a very light load. Acceleration depends on the force and mass: F=m*a.
On a hydraulic system, you need to account for the pressure drop across the valve. The remaining pressure is available to accelerate the load. It will also compress oil. Hopefully, the valve is on the cylinder so there won’t be much oil to compress or hose to expand. With the remaining pressure, the cylinder area determines the force applied to the mass, which will give the acceleration.
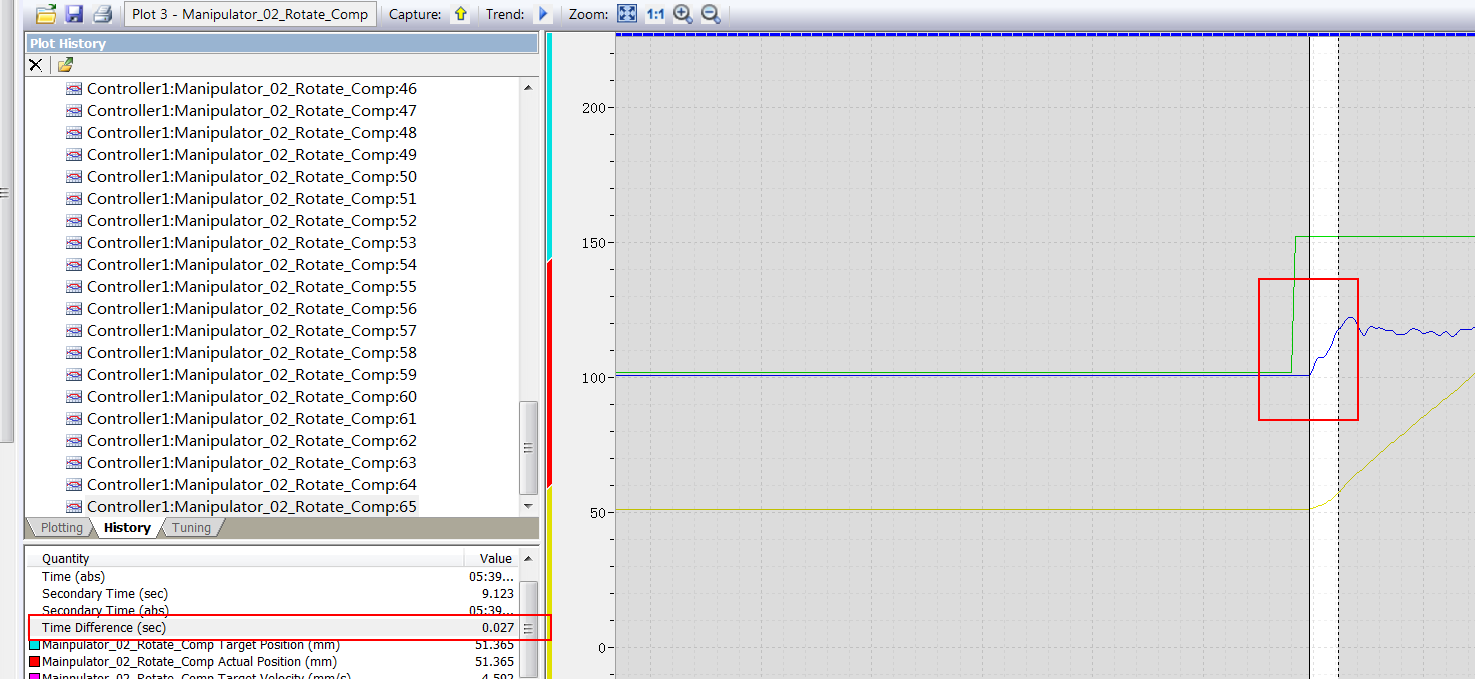
Give the valve a step signal, the actual speed signal is shown below
By calculation, the maximum acceleration of the limit is 11000.
Is this value helpful for choosing the right acceleration?
Assuming the load is the same now as what it will be during normal operation, then yes, a step jump will show what the maximum acceleration from a stop is. The step jump must be 0-100%.