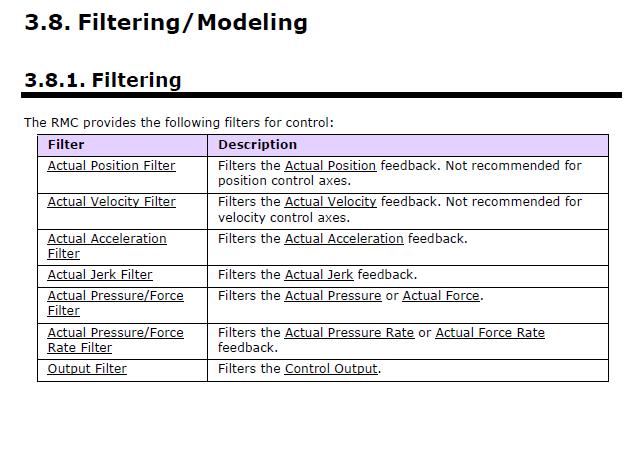
In rmctool there are many kinds of Filtering。
When i use them?
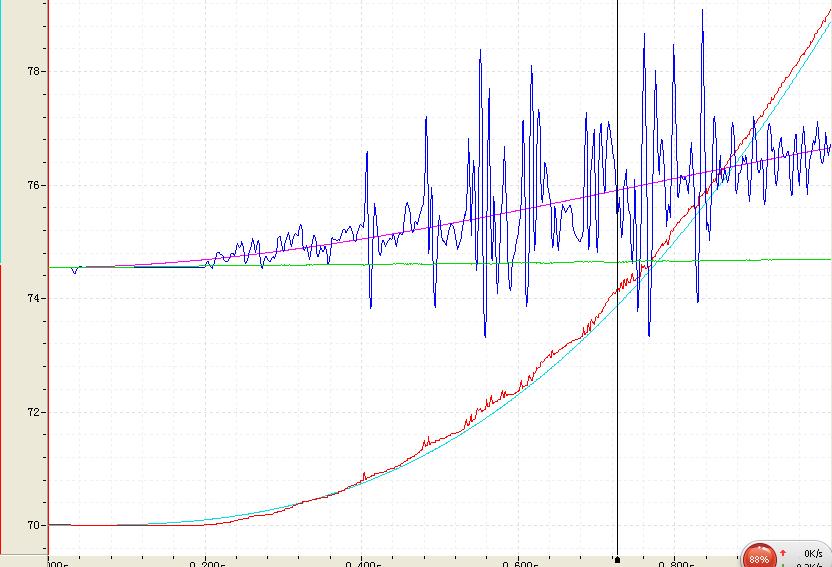
See the attachment,the actual velocity have noise。
Should i select Actual Velocity Filter? In the manual “Not recommended for velocity control axes”. That means Actual Velocity Filter is ok for position control axes. Is it? I want to know what bad influence can occur, if i use the Actual Velocity Filter for position control。
When filtering the feedback of a position axis, we recommend filtering the Position, Velocity, and Acceleration the same. Set the Velocity Filter Type and Accel Filter Type to Low Pass. Then set the 3 filters to the same value (Actual Position Filter, Actual Velocity Filter, Actual Acceleration Filter). Start with a large value, such as 200, and then decrease it to apply more filtering.
The problem with filtering the feedback is that it introduces a phase delay in the feedback. The lower the Filter value is, the more difficult the axis is to control.
I think on your system that the noise is so bad that filtering will not help. You need to fix the noise problem.