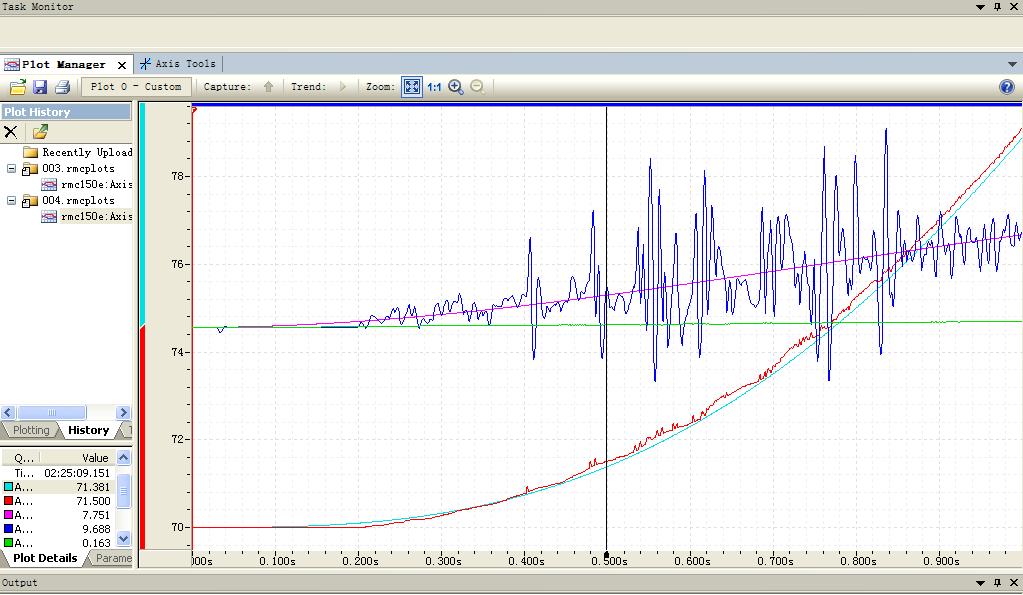
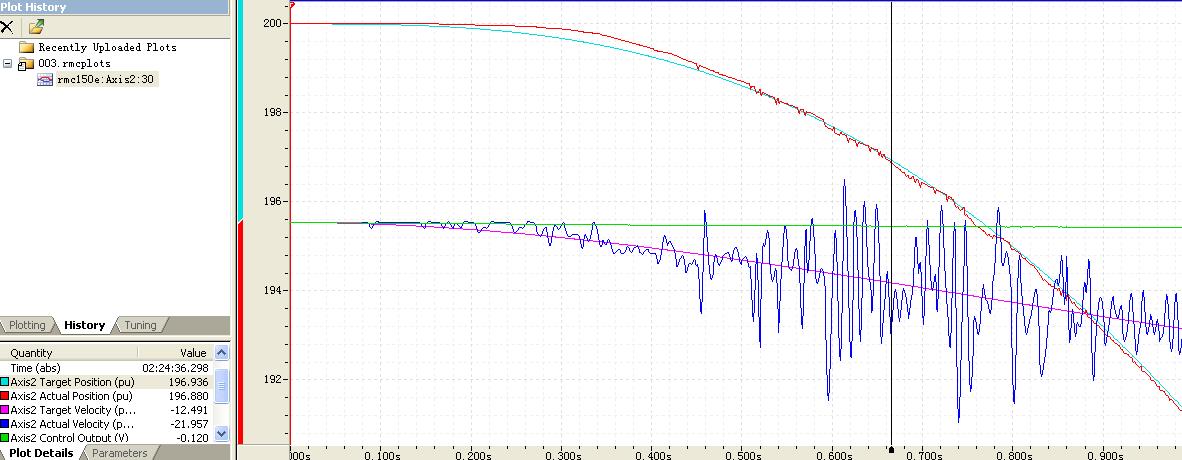
In position tuning wizard, the result plot, see attachment
there are some question
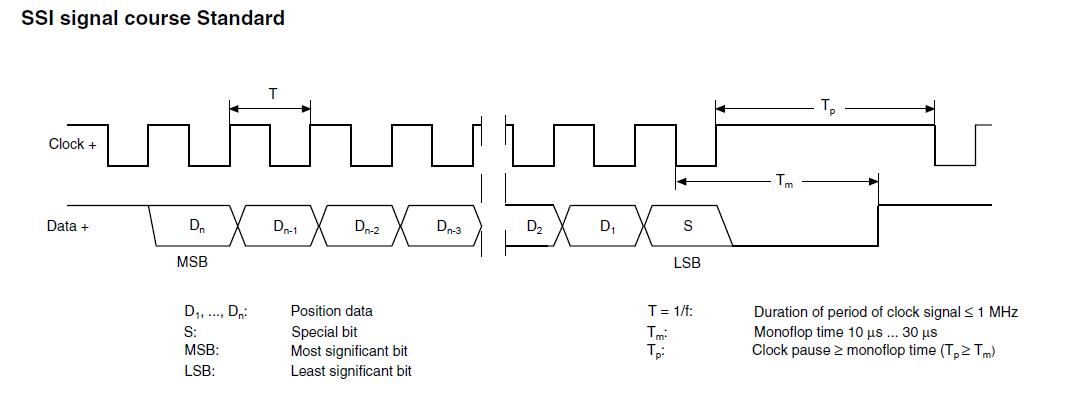
1:why the actual velocity oscillation? encoder Resolution too low? or else。 Improve ssi clock rate? or add output filter?
2:why the plot duration is only 1 s? the duration is litter,cant see the all The whole process?
3:Final positioning accuracy is ok,but the Process accuracy is not enough, how should i modify the paremeter? 001.rmcplots (149 KB)
The noise is certainly very bad on these plots. The position should not be jumping. This will be difficult to control properly. The noise appears to be caused by either mechanical problems in the system, or by a problem in the encoder, or by wiring problems. The Output Filter will not affect the feedback noise. There is a small change that changing the SSI clock rate may help, but I would not expect that to be the problem, unless the encoder requires a specific clock rate.
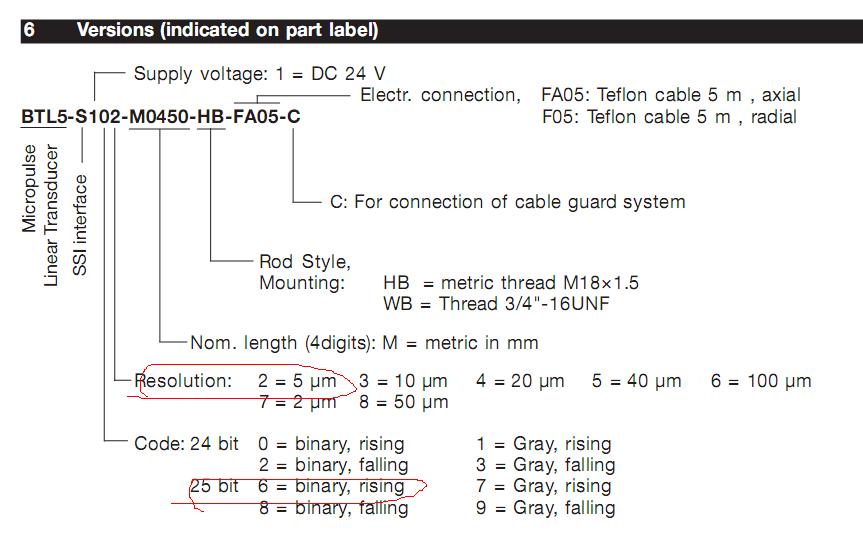
What is the encoder manufacturer and part number of the encoder? Do you have the datasheet?
The plot duration can be changed. In the Plot Manager, on the Plotting tab, click Edit for the desired plot. Set the Plot Duration, then click Download.
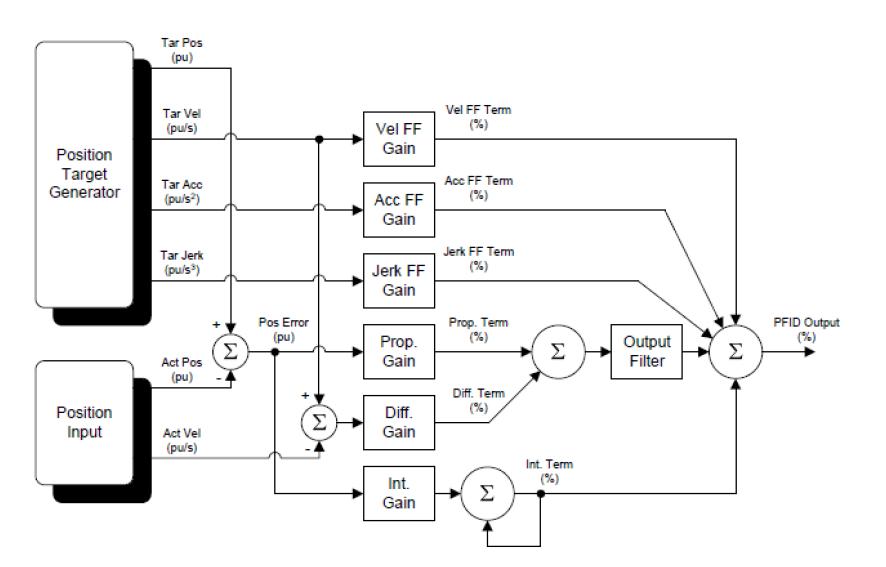
The Proportional Gain can be increased. However, the noisy feedback will limit how much is can be increased. The feedback problem must be fixed first.
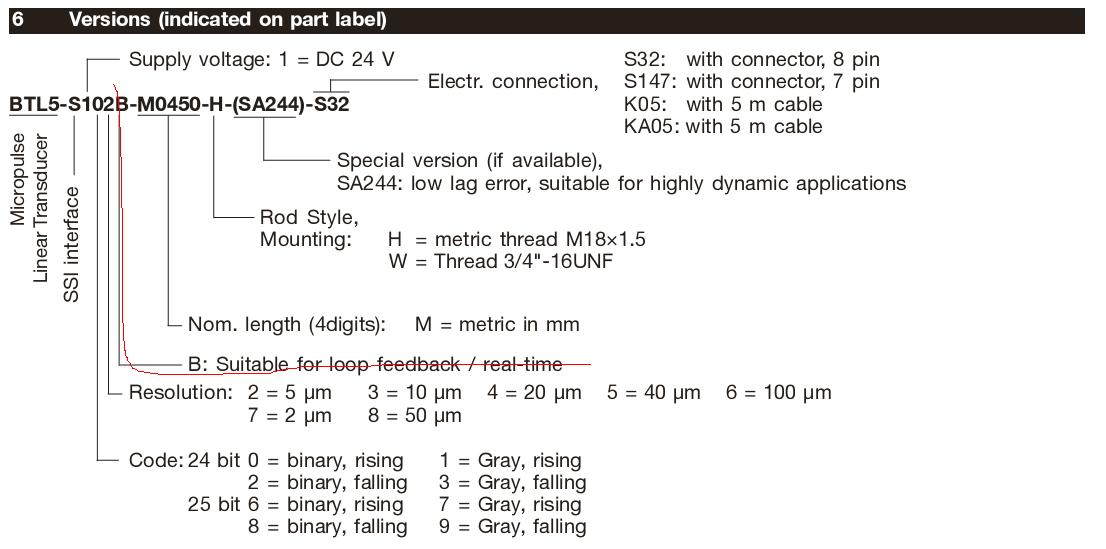
I think the problem is that it is not the synchronized version. It must be synchronized, otherwise there will be noise like you have in your plots. For the BTL5,I think you will need to replace the transducer. On the newer BTL7, it may be programmable.
For this transducer, feedback filtering will help a liitle, but the best solution is to get a synchronized version.
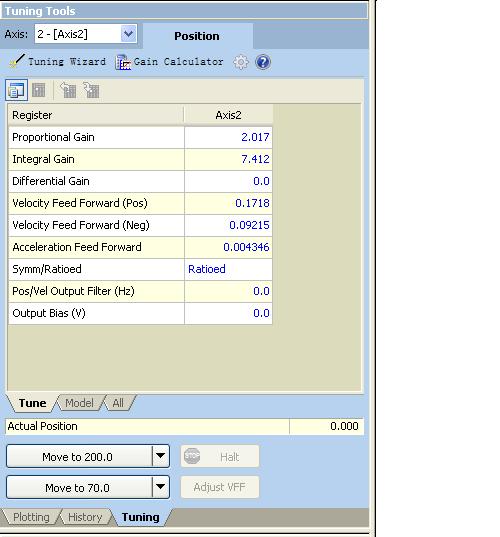
For some reason, now i can’t replace the encoder. i want to use the filter of actual velocity.From the plot, can i get the Actual Velocity Filter?
By default,it is 100.0hz, it big or small 。
A magnetostrictive transducer takes a significant length of time to obtain a reading. Each loop time of the RMC, the axis asks the transducer for its value. If the transducer’s internal position interrogation is not synchronized with the RMC, then it can happen that the RMC may get the same value twice in a row, or a value may be skipped. This results in a feedback signal that is not smooth.
This problem is most evident in the Actual Velocity, but the problem still exists with the Actual Position also. In these situations, the Differential Gain cannot be used, and the Proportional Gain must be severely limited. This can result in poor control. Also, because the Actual Velocity is very noisy, the Tuning Wizard will not work well, especially for the feed forwards. The axis will need to be manually tuned.
Adding filtering to the feedback can help somewhat. Using the Output Filter may also help. For systems that move slowly, this may be enough. For high-speed systems, filtering is not enough.
For the feedback filtering, set the Filter Type to Low-Pass, and start with approximately 100, then decrease the value and you will see the signal become smoother. Decreasing the filter value too far will cause the axis to oscillate.
SSI itself is quick, but SSI is only a method used to transmit the data. In a magnetostrictive transducer, the internal acquisition of the position takes a long time. This is where the problem lies. This problem does not exist in rotary encoders, where the internal acquisition is very fast.
In the RMC, at the very beginning of the loop time, we query the transducer. In synchronized transducers, the transducer detects how often the external device (the RMC) queries the transducer. Then, the transducer synchronized its measurements with the query frequency so that there is very little jitter in the measurement times. This provide a very clean, smooth signal. This is a problem then MTS and Balluff are very aware of, so they recommend the synchronized version for motion control.
The Maximum difference is (1ms position difference )/0.001.
The machine changed very Small in a loop time,
So i think the noise is so bad, synchronized version is one reason. But it Should not be the main reason. Is it?
I do not know if it is the only reason, but it has happened many times that changing to a synchronized sensor has resulted in great improvement. With unsynchronized, it will happen that the velocity suddenly goes to zero, when it actually is not zero, or the velocity goes twice as large when it really is not. This causes significant problems with the PID.