The following functions need to be implemented in the project.
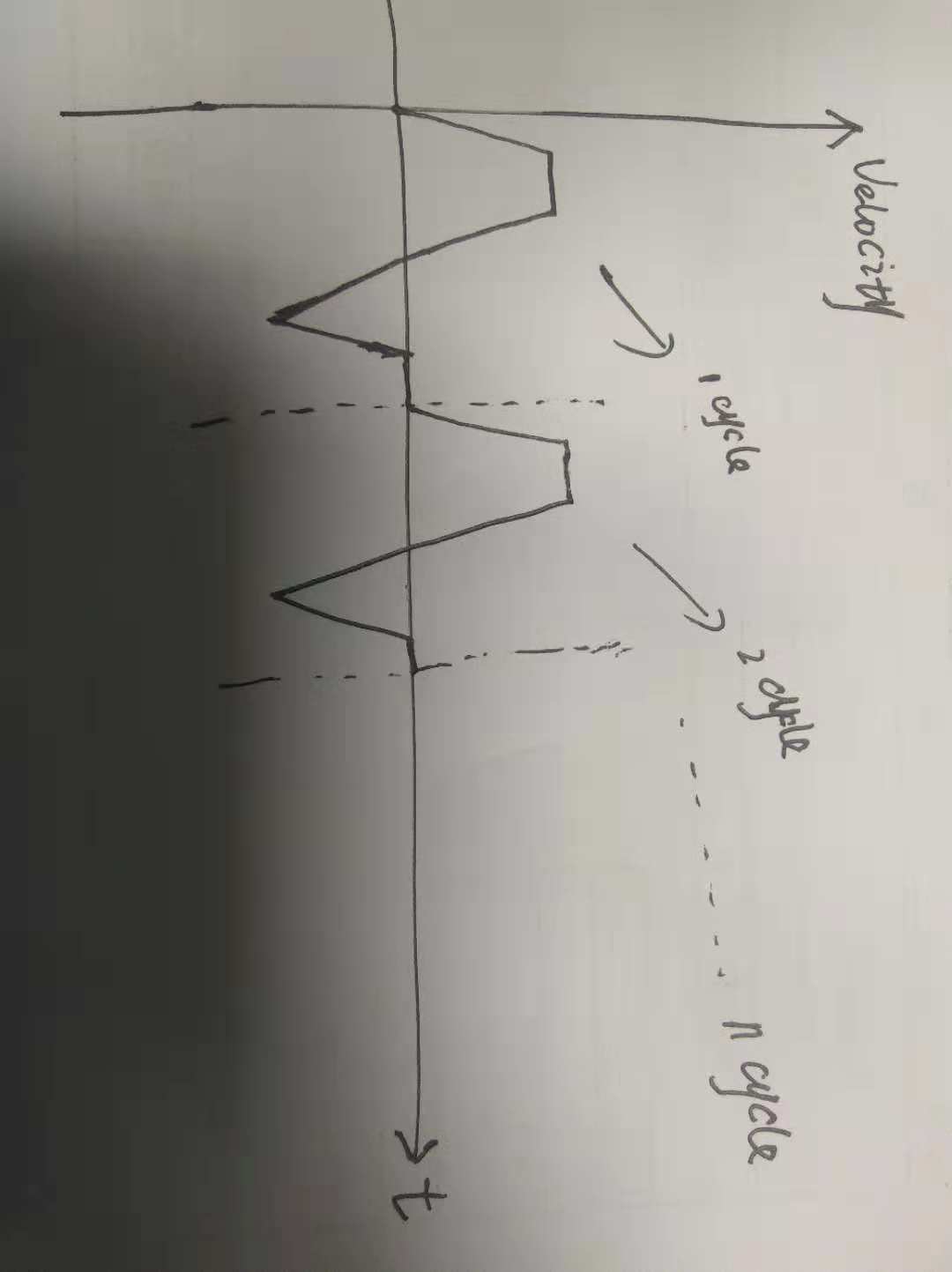
At different points in time, it is necessary to accurately reach the required speed and position.
Currently using the curve function,The current problem is
When using mode Interpolation Linear , the command speed when reaching the target position can reach the required speed. Because the collection points used are not much, the theoretical speed is constant in a certain interval, but the actual situation is that it needs to be at the target point. The position reaches this speed, and the rest cannot reach this speed.
When using mode Interpolation Cubic , although the speed corresponding to different position points is different, but the command speed reached by the target position is slightly different from the calculated speed, and the project
requirements are not met.
At present, I am using Interpolation Linear. By increasing the sampling points to achieve better results, is there any better way?、