In the axis parameters, if the Velocity Filter Type is set to Status only, it means the control algorithm does not use the filtered value, only what the user sees.
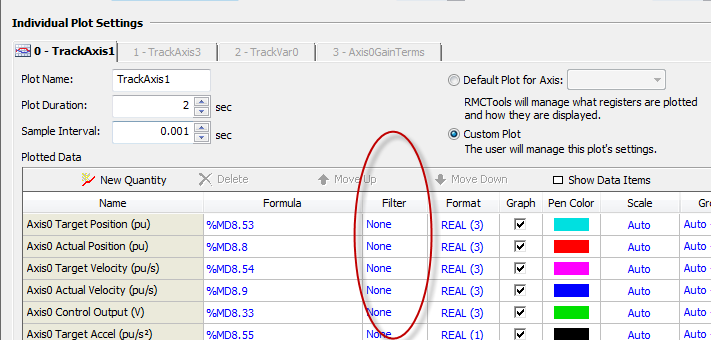
The velocity is also filtered in the plot settings. This can be changed when editing the plot template. You need to choose Custom in the plot template to change this.
Thank you for your reply。 I see the plot template。 Is velocity filtering using sample interval?
velocity is Calculated by controller, it is no relationship with plot。Is it?
Another qestion,
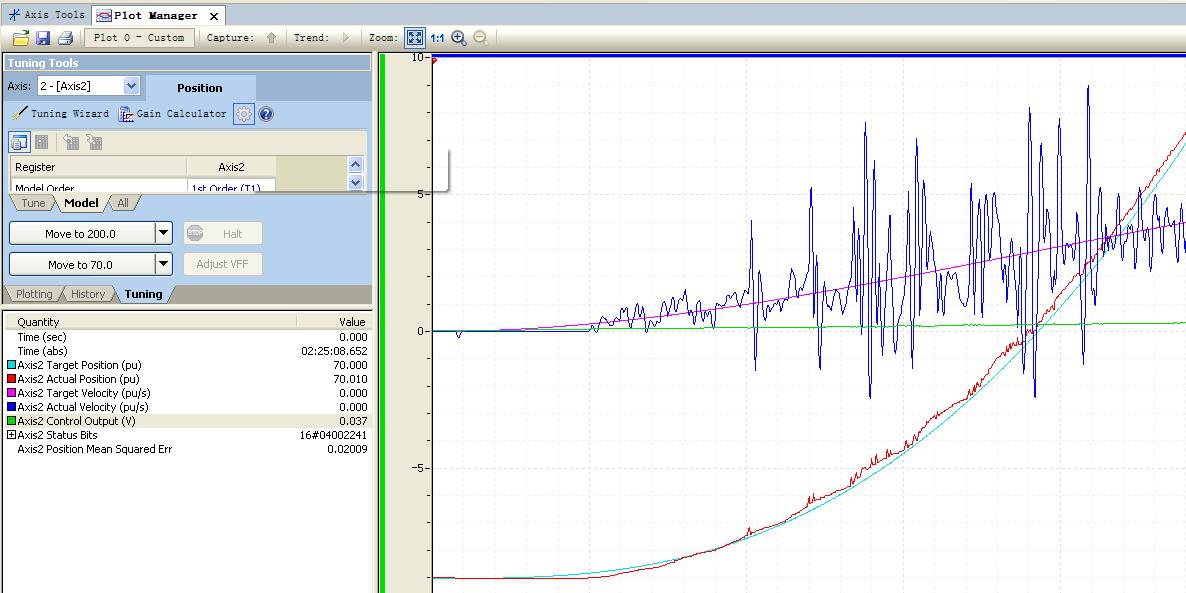
actual velocity is Calculated in every loop time. If the speed is very slow.that means every loop receive a litter.
In the next loop time, if the loop time recive the number is One less, maybe the value is difference is very difficult,
so the velocity move up and down,is it?
thank you for your reply.
I can’t undstand the reason of red part。Can you give me a detailed Explanation。
You tell me the Flutter of actual velocity Because an unsynchronized transducer . that is Inconsistent with the red part。
The RMCTools downloads the positions and then uses that information to estimate the velocity. Strictly speaking the RMCTools does NOT filter the position data but smooths the position data to get a velocity. The difference between smoothing and filtering is that filtering is done real time without using data from the future. Smoothing is uses data from the ‘future’ samples so it can’t be real time although we do it fast enough it looks real time to the user. The quality of the velocity data is very dependent on how fine the feed back resolution is.
We use the Savitsky-Golay smoother. It is second order and it uses the current data point and I believe 10 data points ahead and behind. There is no time constant or filter frequency.
There is a very good forum on using smoothers to estimate derivatives here: holoborodko.com/pavel/numeri … erivative/
I recommend reading the other topics too because they are quite good.
Edit, I found out we often use more points when sampling at higher frequencies and the order of the smoother varies according to the sample frequency. Sometimes the we use a S-G smother order of 4.