Autotuning Error: Insufficient Travel Range
In the autotuning process,Often appear Autotuning Error: Insufficient Travel Range.
Since the system has a given constant voltage and the speed fluctuates, the speed is not stable.
So appear Insufficient Travel Range,Actually has nothing to do with the length of the trip
Is there such a possibility?
The Profile
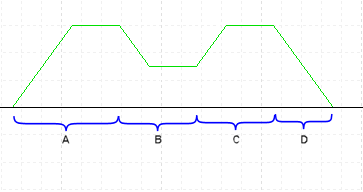
For hydraulic systems or velocity mode motors, when you instruct the wizard to move the axis, it will generate an open loop voltage profile similar to that shown below. Notice that this move will not necessarily take up the entire range between the specified beginning and ending points. On many hydraulic systems, the moves takes only a couple of inches. Section A: The Control Output ramps up to the user-specified Output Voltage at the specified Ramp Rate. The Control Output stays at that value until the axis stops accelerating, at which point it goes to section B. Section B: The Control Output ramps down to half of the user-specified Output Voltage. The Control Output stays at that value until the axis stops accelerating, at which point it goes to section C. Section C: The Control Output ramps back up to the user-specified Output Voltage. The Control Output stays at that value until the axis stops accelerating, at which point it goes to section D. Section D: The Control Output ramps down to zero.
Since the length of sections A, B and C depend on when the axis stops accelerating, the time of this move profile will vary from system to system. Typically, it is less than 0.5 seconds. If the Actual Position gets too close to the specified End Position at any time during the profile, the voltage will go to zero immediately. If the feedback signal is noisy, the acceleration will be noisy, and the autotuning wizard will not see that the acceleration is not settling down, so section B may take too long, and may exceed the time limit, or the position limit.
If the autotuning doesn’t work, try tuning the axis with just the Proportional gain. Make sure to get plots of both directions of motion, then use the Tuning Wizard and select Use an Existing Plot.
Thanks,
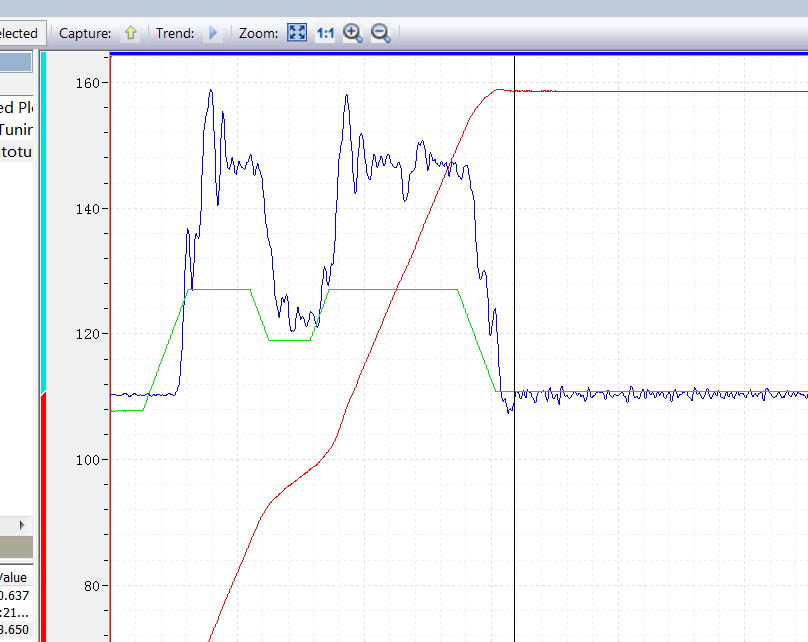
From the curve, the voltage has been completed according to the Profile,see below。
In theory, the voltage curve has already been completed, and it should not be warned. 旋转补偿02_AutoTuning_01.rmcplots (2.81 MB)
I think the last ramp-down of the Control Output was because the error occurred, rather than because the profile was complete. In any case, the plot probably has enough data to use for the autotuning. The error message is only caution, and you can continue the autotuning.
It is fairly common to do the autotuning to do an initial tuning of the system, then make moves that represent typical machine motion, and use plots from those motions to run the tuning wizard again, using existing plots. This way, you are tuning based on what the machine really does, rather than whatever motion the autotuning happens to make.