Currently, I know it is only possible to autotunning throught RMCTools.
I wonder if it is possible to autotunning with LabView Programming.
According to changing Frequency, Gain value is changed in the sinusoidal Program. ex) Sine Start Command, Curve, etc…
So we need to autotunning Command in Labview program.
A lot depends on what is possible wuth Labview. Autotuning is too difficult to write on your own so Labview must have be able to fit a model that best fits the relationship between the control output and the actual position or velocity. Also, the excitation is critical. If you look at what RMCTools does you can see the excitation is kind of a M or W profile with some flat spots. A simple sinewave will not do because the gain changes going from the positive direction to the negative direction.
Does Labview have the abiltiy to autotune anything? Can Labview auto tune motion systems? Temperature systems are much different from position systems.
What do you mean by M or W profile ? I don’t understand what they mean.
Please describe into detail about that.
In LabView, autotune program is but good program is not.
When PC(with Programmed LabView) is connected to RMC70 via ethernet, I want to know about being possible to automatically change ‘PIDF gains’ through plot profile while plot dat continually draw.
And As new value apply when it push autotune button in RMCTools… In Labview, is it possible…?
Sorry about troublesome question…
Thank you for your quick reply …
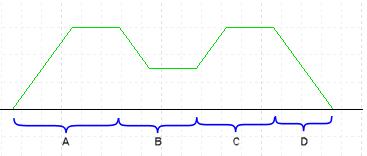
The M or W profile refers to the Control output signal generated by the RMC during autotuning. In the autotuning wizard, on the move pages, if you click the help button, it will open a topic that describes the profile, as shown here:
Notice that the profile looks like a M (or W for the negative direction).
Since the profile is always the same sign, and never crosses zero, this profile ensures that the gains calculated for from the plot are for that direction. This is important because a typical hydraulic system has different gains in either direction of motion. If you used a plot from a position sine wave, then it is very difficult to determine what the gains should be for each direction.
The autotuning algorithm used by RMCTools is fairly complicated. Implementing it in LabVIEW would require superb knowledge of controls, mathematics, and the RMC, and therefore is probably not feasible.
How are you doing the autotuning now? Are you using a sine wave plot? Does your system behave differently in both directions of motion?
You could possible use RMCTools to do autotuning for various frequencies, then store those gains and simply apply the gains when you change frequencies. This would be the easiest method.
I am sure it is but you would need to write all the code. It would require a lot of studying of control theory, some experimentations and a lot of code. Calculating the velocity feed forward is relatively easy. In fact we have a velocity feed forward adjust command. The other gains are not.