Problem:
In RMCTools, when using a dual-loop position-pressure or position-force axis and with the default Auto Stop configuration, encountering a force feedback error such as “Pressure/Force No Transducer” will keep the user from executing not only closed loop pressure-force commands, but also closed loop position commands. If closed loop position control is still needed while a “Pressure/Force No Transducer” error is set, then adjusting the Auto Stops settings can be a solution.
Solution:
Some open loop commands such as Direct Output will ignore Auto Stop settings and can still be sent to jog the axis. However, in order to still execute closed loop position commands while a “No Transducer” force error bit is on, the user can set the error to “External Halt” in the Auto Stop configuration.
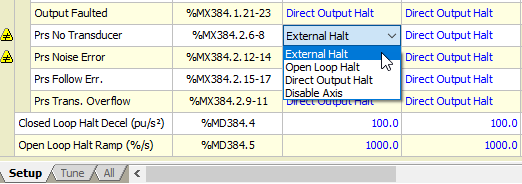
With the affected Auto Stop set to “External Halt,” force error Auto Stops will still be logged in the Event Log and will appear in RMCTools but will not stop closed loop position commands from being executed. If a Pressure/Force command is sent, a Command Error will be reported and the command will be rejected.
Additionally:
If the opposite problem exists and position feedback is broken but the user would still like to issue force commands, set the No Transducer Autostop to External Halt. Then force commands can still be issued.