Hello,
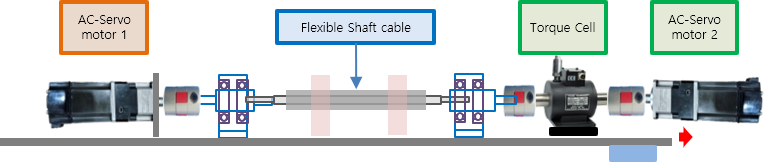
I’m new to using the RMC 200 and am currently testing it for the first time. I’m working with a setup as shown in the attached image, where I plan to control the Torque Cell (on the right side, Green) and AC-Servo Motors 2(Right side, Green).
Basic Specifications:
- The Torque Cell has a ±10V output, with 10V corresponding to 10 N·m.
- The AC-Servos are Mitsubishi motors, and I plan to control their speed using analog ±10V signals.
Desired Operation:
- The left AC-Servo (Brown) should rotate at 3000 rpm.
- The AC-Servo speed should be feedback-controlled to maintain a constant 2 N·m on the Torque Cell.
(The goal is to use the AC-Servo and Torque Cell to create resistive torque.)
I’m not sure how to set this up using the RMC Tool, as I’m a beginner. Could anyone provide guidance on how to proceed with this configuration?
If you need more information or have any questions, please feel free to ask.
Thank you in advance for your help!
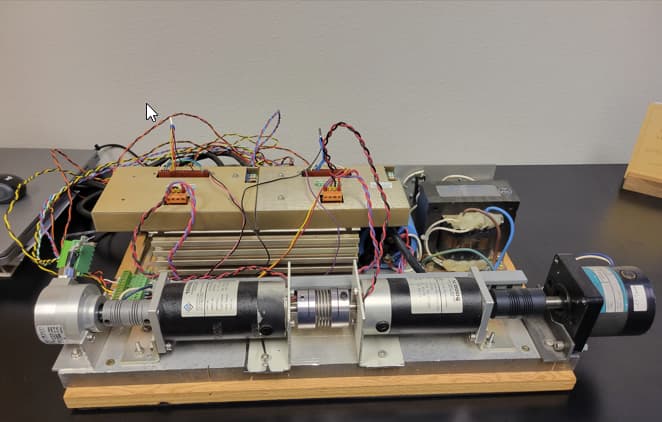
I have an old system that performs this type of operation. Here is a picture of it:
The main question I have is how will the RMC receive the position from the AC Servo motors? It may perhaps only be necessary to get the position from the first motor. The motor probably has an encoder on it that is connected to the drive. Often, the drive can send the position to the RMC, or the motor encoder can send it to both the drive and the RMC. If you can provide the part numbers of the drives and motor encoders, that will help figure this out.
Once it has been determined how to get the position to the RMC, then the next steps are:
- Define a position axis for the first motor, using a +/-10V output and some type of position feedback.
- Define a force axis for the second motor, using a +/-10V output and a using a +/-10V input (from the torque cell).
- Configure and tune up the position axis.
- Configure and tune up the force axis.
At this point, it should work. However, for good control, it may be necessary to do some extra tricks, like create a custom velocity feed forward on the force axis. We can assist with this once you get there.
-Jacob
Thank you for your response.
It seems my explanation was not clear enough, so I would like to add some more details.
First, Servo 1 (left) will be controlled separately from the PC via a motion card.
The position will not be transmitted to the RMC200.
Only the right torque cell and Servo 2 will be connected to the RMC to perform feedback control.
- The torque cell is connected to the RMC200 with a +/-10V input, and the servo motor speed is controlled using +/-10V.
- The PC will rotate Servo 1 (left) (not connected to the RMC200).
- The right Servo 2 and the torque cell will operate with feedback to maintain a constant torque cell value.
I would like to know how to configure and use this setup.
(I have searched through various tutorials on YouTube, but I couldn’t find a method for operation without using the servo’s position.)
You can configure an axis in the RMC as force control, using the torque sensor as the feedback, and the axis’ +/-10V control output going to the motor drive. You should be able to control the torque in this manner.
If the motor speed is constant, this should result in good control. However, if the motor speed varies significantly, the torque control will experience a lag, and every time the motor speed changes, the torque will either drop or rise, and it will take some time for the torque to get back to the correct value.
The best solution is for the RMC to also control the first motor. Then, you can create a velocity feed forward that is added to the torque control loop, where the velocity feed forward is derived from the target velocity that has been generated for the first motor. This can provide excellent control.
The next best solution is to have the actual position transmitted to the RMC, either from the first motor system, or by adding an encoder to the system that is connected to the RMC, so the RMC can read the actual velocity. This actual velocity can be used to create a velocity feed forward that is added to the torque control loop. This can provide quite good control, but the actual velocity is noisier than a target velocity, so it will not be as good as using a target velocity.
If neither the best or next best solution is possible, then you can only do what I first listed above, and the torque will have trouble when the speed changes, but will eventually reach the desired torque after the speed has finished changing. How well it controls depends on how much the speed changes, how fast it changes, and the required torque tolerance.
-Jacob