How to achieve rapid positioning in the final stage of hydraulic servo, which parameters are generally adjusted for rapid positioning
In many projects, the positioning accuracy time in the final positioning stage is too long. Adjusting which parameters can effectively improve the positioning time in the final stage
Or by what means to determine which parameters to adjust
A higher deceleration will create a motion profile that tries to stay faster longer before slowing down. The natural frequency of the system will limit what is possible here.
Manipulator_Rotate.rmcplotx (1015.7 KB)
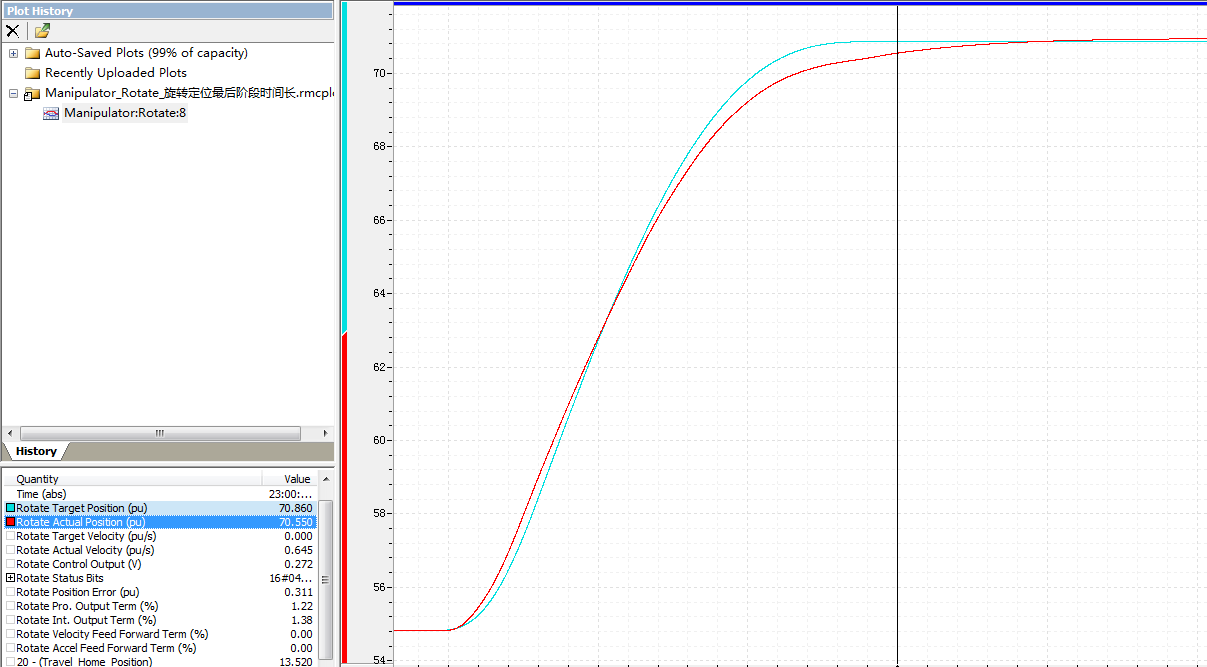
The curve part of the above figure
Which parameter is inappropriate, which caused the slow positioning in the final stage
Tuning Position
Too much Acceleration Feed Forward?
The overshoot at the beginning of the move and undershoot at the end indicate that the Acceleration Feed Forward is too high. I also think you could use some Output Filter (larger value = less filtering) and then increase your proportional and integral gains as well.
For the Output Filter, I would start with a value like 50 Hz and reduce it if my control output was looking too “grassy” or fuzzy.