Hey everyone,
I was following along the webinar that talks about leveling presses and gearing the physical axes to a virtual and outer control loop. I have all the code setup exactly as in the video, and am trying to get a simple example to work but am running into some faults. I have 4 cylinders right now that are decoupled from any sort of platen.
I have the custom position and force feedback going to the outer control axis, and have the gearing program that the video uses:
- All 4 cylinders are moved to the average of their position, and the virtual axis target position is set as that average.
- Once they are all in position, I set the transition rate for each physical axis.
- I then gear absolute each cylinder axis to the virtual axis.
- Then the virtual axis is velocity geared to the outer control axis.
This program seems to work fine on its own, and I can see all of the cylinders align. The problem is when I try to use that program in a larger program.
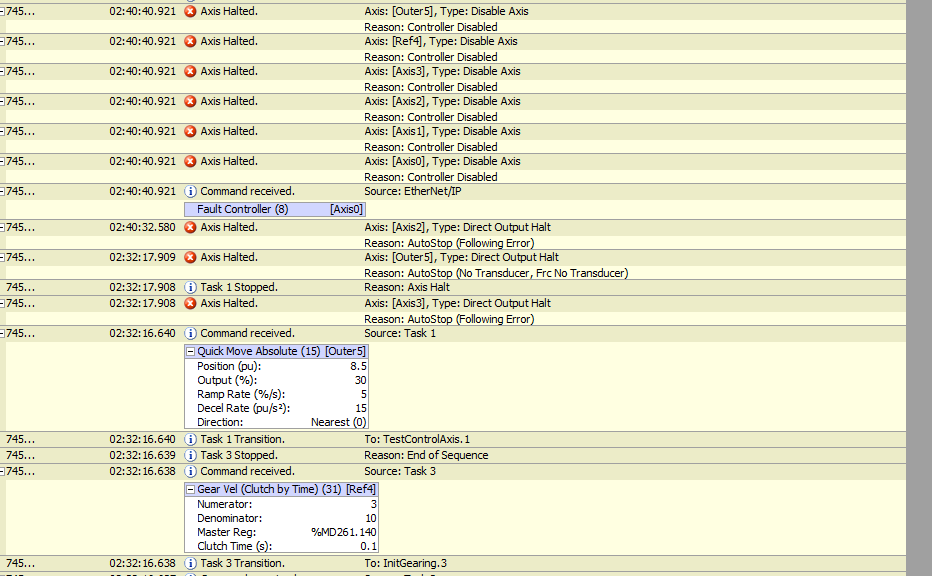
The gearing program runs, then the moment I try to quick move absolute ( the example used in the video), I get a ‘following fault’. You can see the event log below right before it happens. I read the documentation for the “Following Error” but don’t fully understand how what I am doing here would trigger it.
Any help would be appreciated!