Many Times in a machine or pressing operation you want to do a rapid move followed by a slower feed move as seen in the attached image
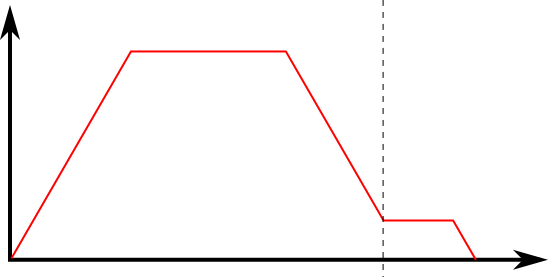
It would be nice if there was a variation of move absolute that let you specify a residual velocity at the end of the move so that when you reach the target position (vertical dashed line), you can continue on to a final position at the slower “feed” velocity with an additional MoveAbsolute with the slower feed velocity and final position.
I know the math isn’t all that daunting but if you have an operation like a peck drilling routine where you are continually doing this rapid/feed to deeper and deeper points it would be much easier if it was built into a command. I came up with the following to calculate the position where deceleration must start to reach the desired (feed) velocity at the target point.
StartPos:=1.0;
FeedPos:=5.0;
FinalDepth:=5.25;
VelRapid:=5.0;
VelFeed:=0.2;
Acel:=10.0;
DeltaV:=VelRapid-VelFeed;
TimeDecel:= DeltaV/Acel;
DistDecel:=(VelRapid*TimeDecel)-(0.5*Acel*TimeDecel*TimeDecel);
DecelPoint:=FeedPos-DistDecel;
Then I start one MoveAbsolute to the FinalDepth and when the position is greater or equal than the DecelPoint, I start another MoveAbsolute with the VelFeed to the FinalDepth position.
Like I said, this works but perhaps people would benefit from this being in a command.
Thanks