Hello,
inspired by webinars I played with RMC online controller and tuning the simulated system (position control). I have noticed something that appears strange to me. For example, the system is in steady state in position 10 mm. When “Move absolute” command is sent to the controller, there is first negative velocity shown in the Plot
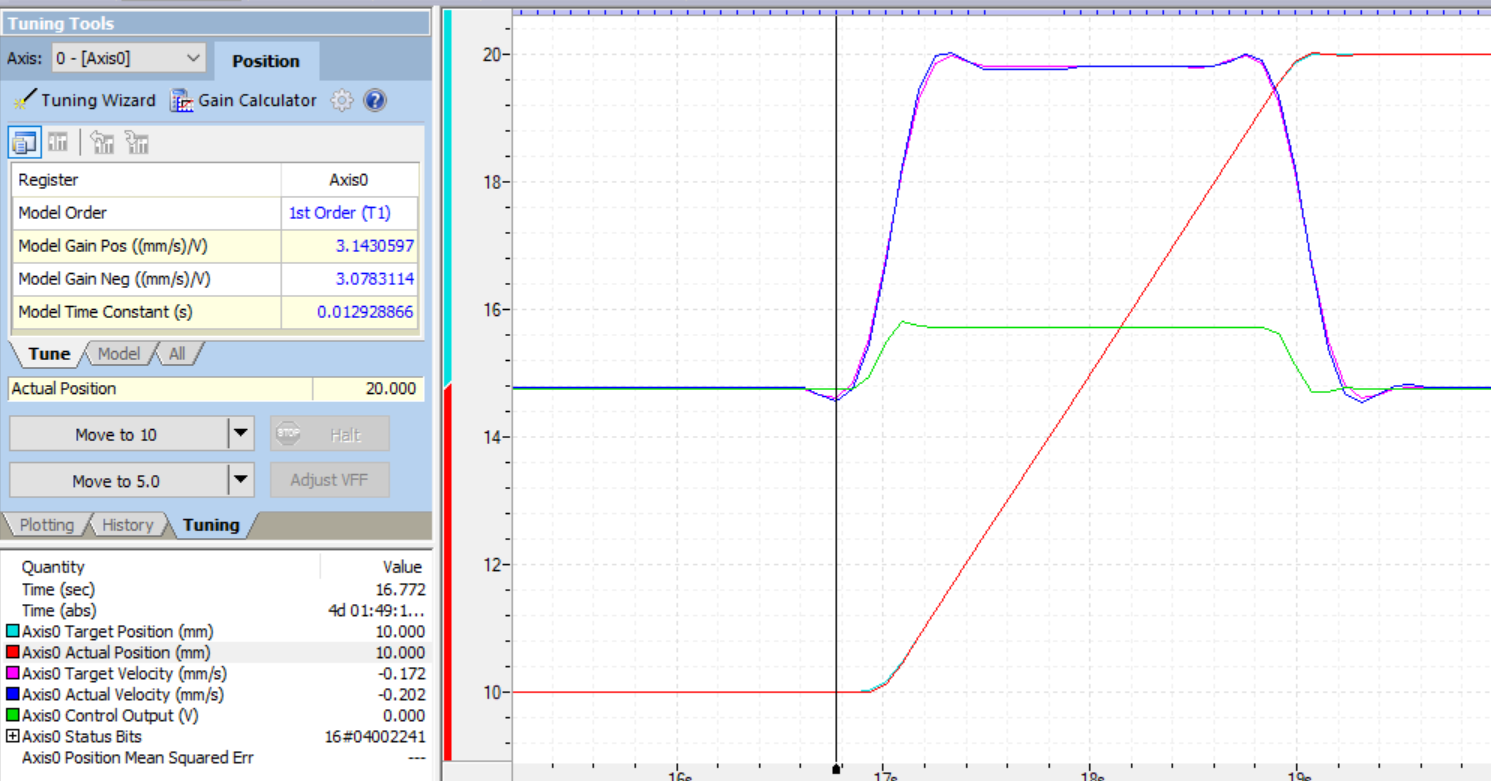
I have uploaded the plot for you to see. I’m not sure why this is happening.
Regards,
Pandiani