Regarding following Delta, Motion Control - controller and modules used,
- RMC75E (CPU) +
- AA1 (Axis Module) +
- AP2 (Exp #1)
Requirement
- RMC75E Controller to run the configured and deployed PID program independently, based on the Setpoint and limits provided via Modbus/TCP
- PID Control Loop requirement
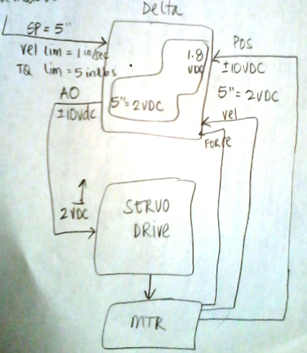
Scaling
Position = 0 – 30 in
Velocity = +/- 10 in/sec
Force= 0 – 1000 lb
Following will be set via Modbus/TCP to activate the PID
Position Setpoint= 5 in
Velocity Limit= 1 in/sec
Torque Limit= 5 lb
Physical channels AA1 (Axis Module) AP2 (Exp #1)
AO=AA1 - “Axis” connector
AI= AA1 - “Axis” connector………………Force Feedback
Physical channels AP2 (Exp #1)
AI= AP2 (exp#1) - “Input 0”………………Position PRIMARY Feedback
AI= AP2 (exp#1) - “Input 1”………………Velocity Feedback
Problem/Issue/Query
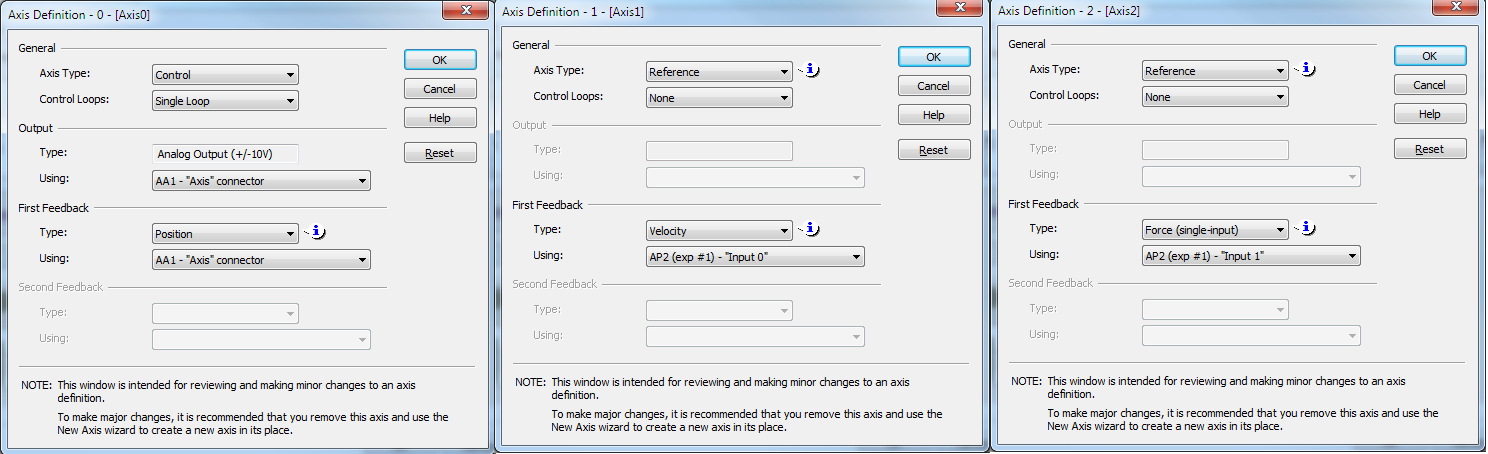
- The first and basic question for me is how do I configure the Axis Definition
Right now I have configured as below,

- The second question as of now is whether I can communicate RMC75E connectivity through Ethernet VIA Modbus/RTU