Is it possible to precisely control force with unequal area cylinder?
We have designed 10000 lbf capacity cylinder working at 210 bar & want to control it in force control loop with intended ±10 lbf force accuracy.
Cylinder speed is 50 mm/sec…
If you try to do this with pressure transducers, even ones rated at better than 0.1% full scale, you usually have a problem with the stick/slip of the cylinder seals and even the flexing of the seals. When the pressure changes in very small increments you have no way to determine whether that pressure change is due to the force imparted at the rod end or the seals sticking or flexing in the cylinder.
You can get a cylinder with cast iron ring piston seals which greatly reduces the issue at the piston but you need a rod seal that doesn’t leak that will still have an impact on the overall force determination.
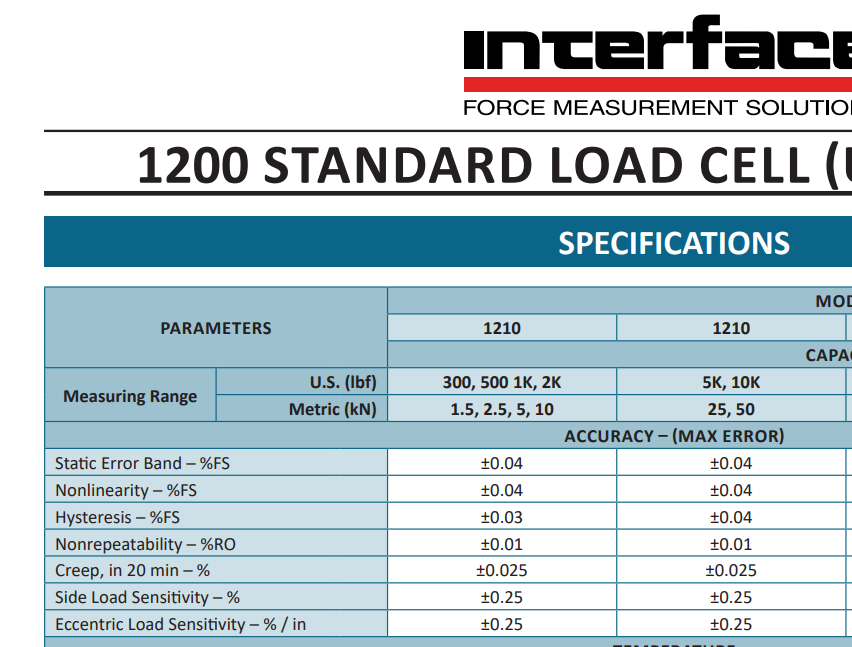
I think it’s better to try this with an external load cell connected between the rod and workpiece. Good quality standard load cells have ratings in the neighborhood you are looking for. But I usually see them listing all the different types of accuracy. So it’s hard for me to figure out an overall accuracy of a unit. Interface is a popular load cell manufacturer. Here is a snippet from one of their standard load cell data sheets:
So while each one of these numbers is below 0.1%, I think they may combine to actually be more than 0.1% in some worst case (maybe even not worst case) situations. Also see in this chart that side loads and eccentric loads really affect the accuracy. This means that mounting is very important.
We had a system for testing a range of parts and the only solution was to set it up for different load cells for different size parts. They originally wanted to just size the load cell for the largest forces. But in the end, they really needed the accuracy on the smaller parts which dictated using lower range load cells for those parts and changing the load cell out as the parts got bigger.
One more consideration is how the load cell is amplified. The RMC200 can take a load cell directly but RMC75 and 150 will require some amplifier to read the strain gages in the load cell and provide a voltage output. The load cell manufacturers can provide this or 3rd party suppliers. These have to support the accuracy you need as well.
I would like to point out that controlling force with an unequal area cylinder is normally not really any different than with an equal area cylinder. When using pressure sensors, the force on the cap end is calculated by using the pressure times the area of the piston. The force on the rod end is calculated using the pressure times the annular area of the piston. The total force is the difference between the two forces. The motion controller with the valve can control this force just fine.
An equal area cylinder is important for high-frequency sine waves, as it is easier for the valve spool to transition from side to side in a sinusoidal motion rather than needing to change velocity suddenly to account for the different flows required by an unequal area cylinder. So if the force control is for high-frequency sine motion, then there is an advantage with equal-area cylinders.
As ndzied says, using pressure sensors to control force to 0.1% is not reasonable, mostly due to the seal friction.