I’ve got about 25 user programs in a RMC75E-QA2 … all happily making two LinMot linear actuators generate waves in a small model ocean. The actuators start and finish at an “initial” position (0.0), and some programs use offsets, and often shift the wave making “sequence start” position. If a sequence is stopped, the stop program also returns the actuator to it’s initial position. So… most of the programs were written assuming the actuator would be at 0.0 when the program is initiated.
Turns out, sometimes it isin’t. Methinks a good programmer would make sure the actuator is “in position” before starting… and if not in position, send it there… 
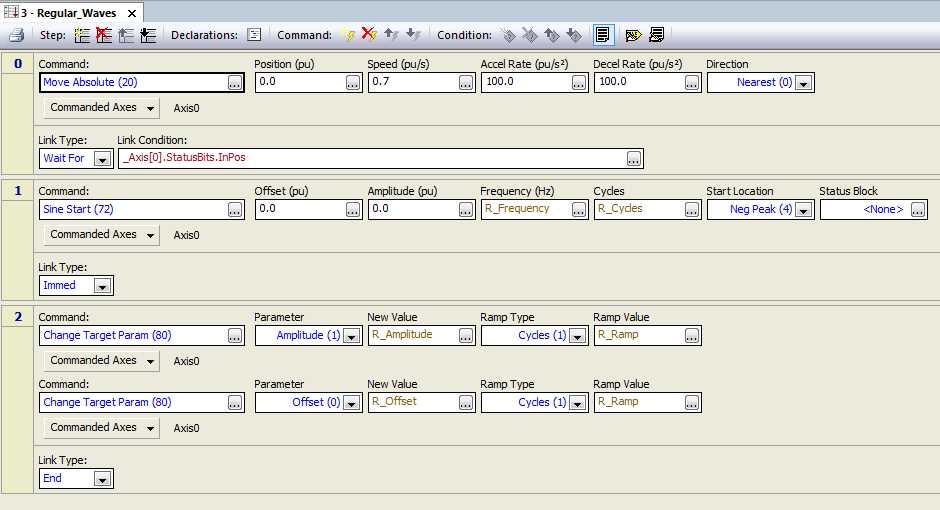
I’ve always thought Move Absolute (20) was the solution to such potential problems… but, sniff, i can’t make it work. Here’s an example of a simple program that creates a fault if the actuator isn’t at zero, when started:
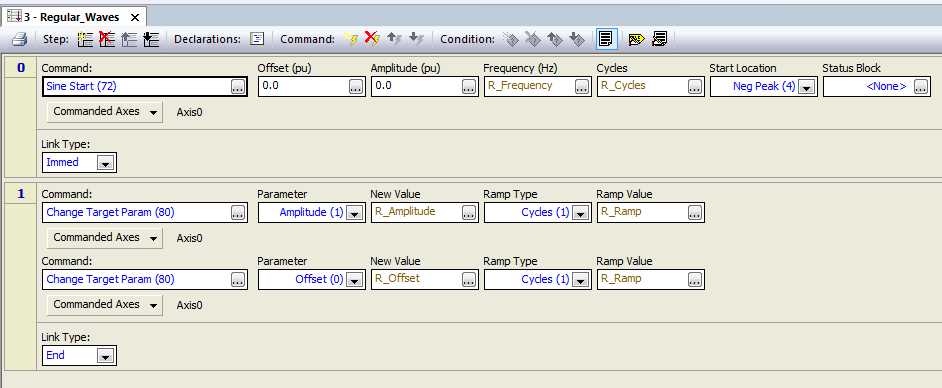
Below, I thought would be the solution:
worked fine if the actuator was already at zero… but jog it a little away from zero… and the Move Absolute (20) … doesn’t bring it back to zero when the program is started. same fault with too high a position discontinuity.
been reading RMC TOOLS … don’t see any clues to a solution yet…
Something is keeping the actuator from moving to 0.0. Show a plot. Are there any errors?
Happy New Year Peter… Thanks for the fast reply, and YES there is an error or fault. I will plot curves, and present all into on the fault that I can find.
You didn’t mention my “Fix” to the program as a solution that ought to work … 
Was I correct in assuming Move Absolute (20) could start any positioning program, regardless of where the actuator was last stopped?
Yes, I think your fix should work.
…then this is indeed, a worthy challenge to resolve. I’m on it!
Aaaaaagh… GADZOOKS! … I’ve made a horrible mistake … I have so many programs in the “program” I didn’t realize my example program works fine… some of the commands from the HMI just call a Sine Start (72) … an’ that’s not a user program … it’s a nice feature of the RMCs’ DUH! … My program names were too similar … There’s nothing wrong… nothing to see here… these are not the droids you’re looking for. 
A nice feature of the RMC is that multiple sources can send commands to it. This helps create the confusion and bewilderment necessary for providing enough stress in life. A life with no stress is not healthy. Of course, that may not be a serious problem in this specific situation.
It happens, Lamboom. That Star Wars reference almost made me spill my coffee. Who did you discover where the problem was exactly?
That’s a good question … I think anyone who works regularly with the RMC and a managing HMI … Like the Red Lion wold have spotted the error instantly. Because the “Error” wasn’t in the RMC. I was using the HMI to launch a Sine Start(72) command, I was also using the HMI to launch user programs that created sine motion by using Sine Start (72) as a step. A User program can have Move Absolute (20) at the start, to place a linear motor at zero. However, the “RMC Commands” are not user programs, but, they can be called to run by an HMI … (similar way they launch a user program). If you are going to call a Sine Start (72) … you must already have the motor at zero. I made the mistake of thinking one of my user programs was not working after I placed a Move Absolute (20) at the beginning. Then, discovered I was calling a RMC Command, not a user program… DUH! … there is nothing to see here… move along.