I have an RMC75E with AA1 controlling the motion of an actuator. The feedback transducer is a simple string potentiometer, and the motion control valve is a Parker D1FP proportioning valve with zero overlap.
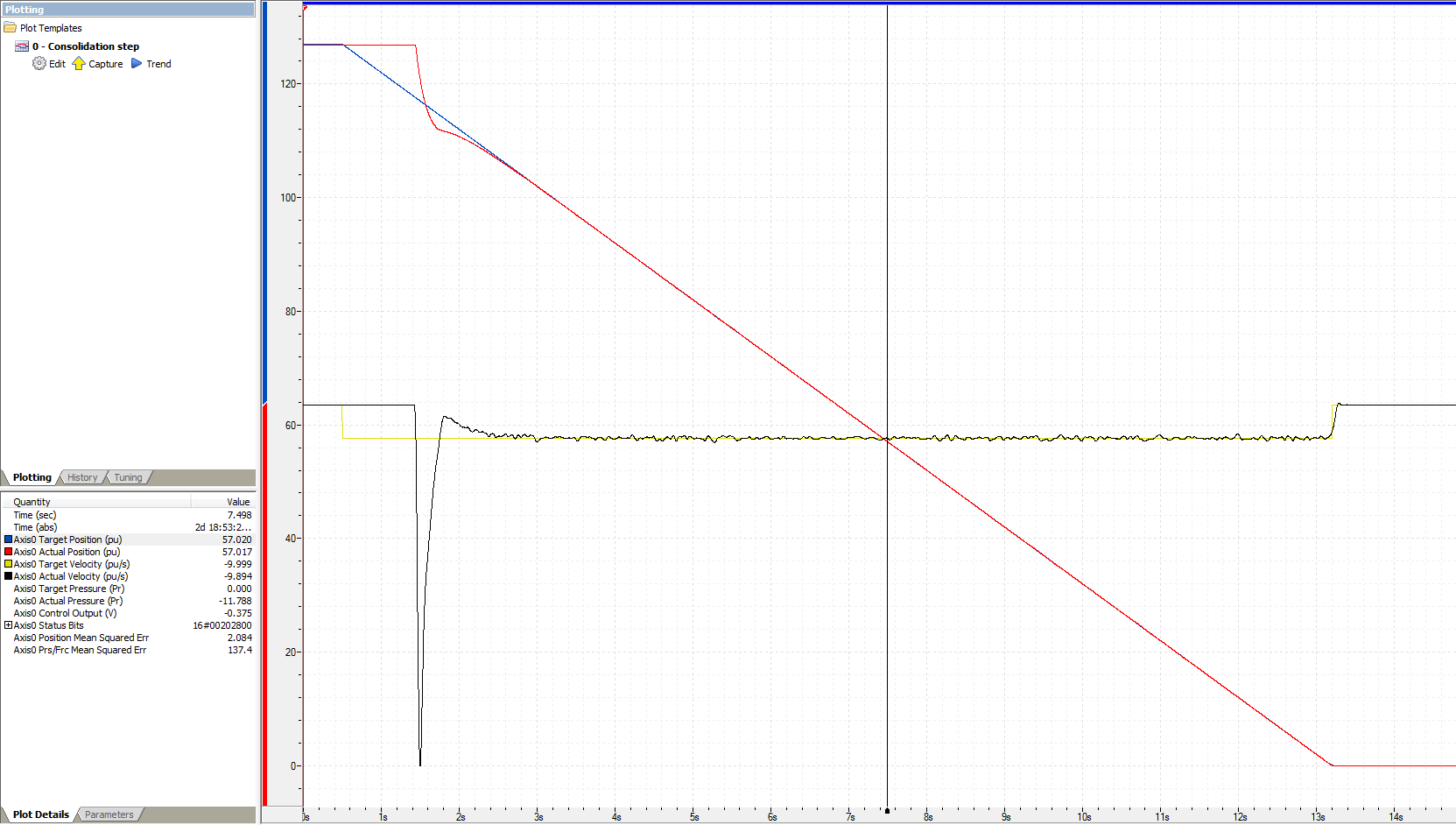
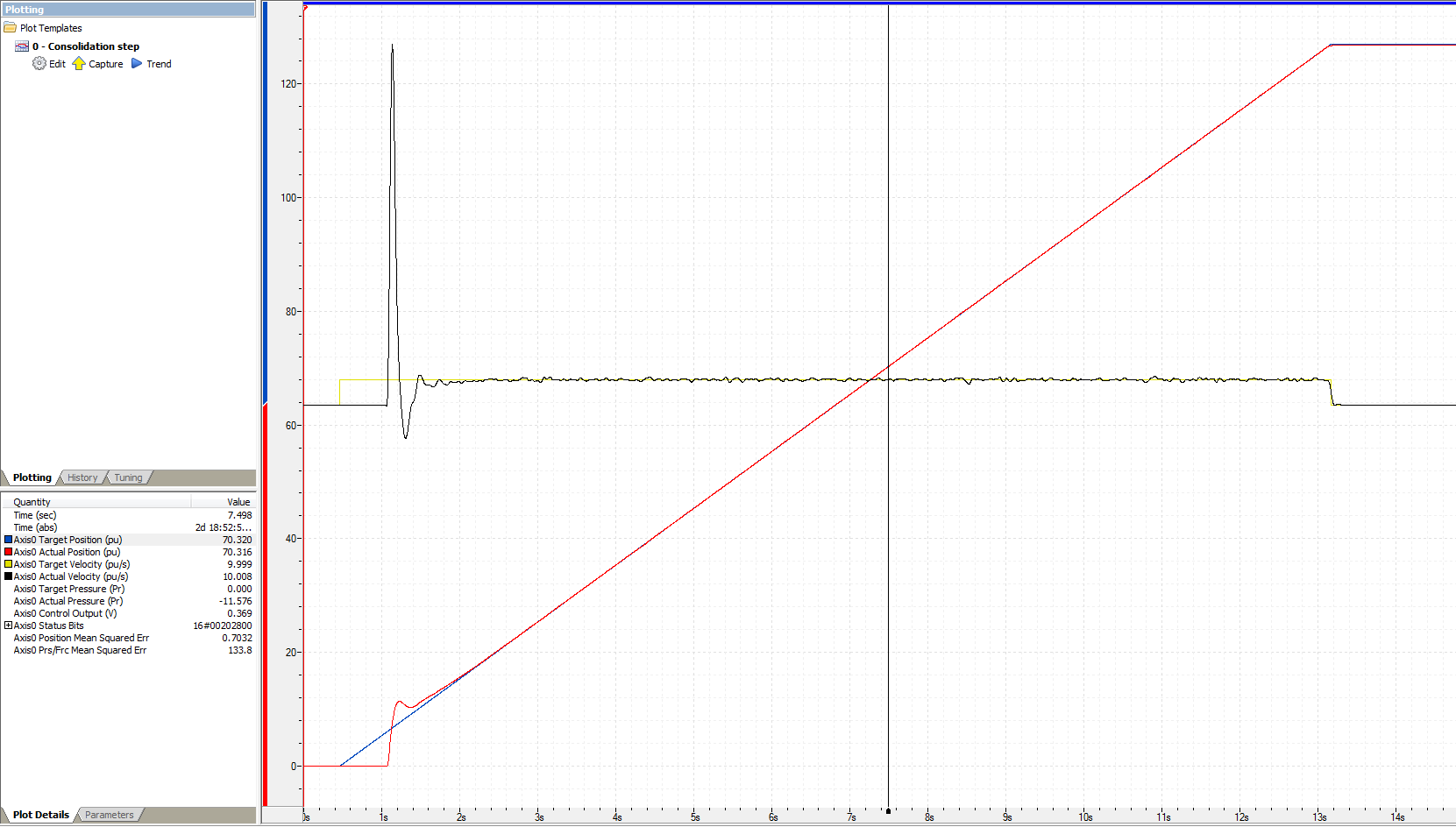
I have set the control parameters to a simple PI loop (ie P and I terms are non-zero, all other gains are zero). When I try to move the actuator I get an unexpected lag in the response. This is easiest to see in the attached plots, where I command a simple position ramp. You can see that when the ramp starts there is about half a second of delay before the axis begins to move, and then the axis quickly jumps and begins to follow the position ramp accurately. When the ramp stops, the axis stops.
This behavior is consistent whether I ramp in or ramp out - the start of motion lags the command ramp, but the end of motion tracks accurately.
I can’t see this behavior being part of the expected PI behavior - I’m guessing there’s some other feature in the RMC75E control parameters that I’m missing? Any recommendations where to look? Thanks.
-Dan
Could you include the Control Output trace in the plots? This will help provide more info on what is going on. Also, if you just save the plot file and attach it to your post, then more info will be available than just a screen shot.
As a first step in troubleshooting, try sending an open loop command to the axis and see how it responds. Try various voltage levels and try a slow ramp as well. This will help characterize the system and will likely tell us whether the problem is in the mechanical system or in the control.
-Jacob
Hi Jacob
Thanks - I need to figure out how to turn on notifications, I didn’t realize anybody had posted an answer yet 
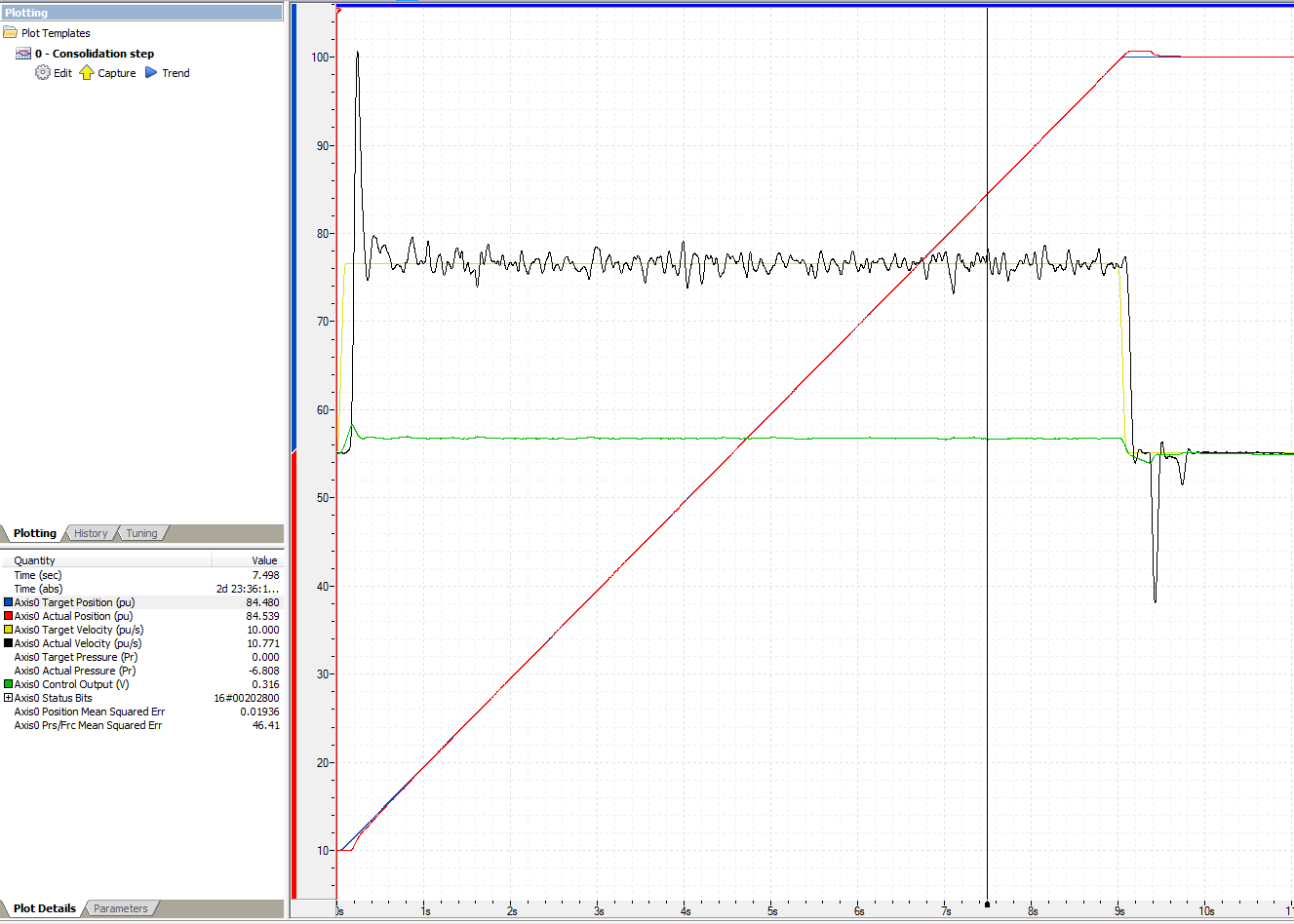
One thing we figured out yesterday was that we were starting from a bad spot - the actuator travel is set somewhat less than the electronic travel, so our initial condition had the actuator at full stroke, rather than at a fixed position. We repeated the test running from point A to point B but staying within the actuator travel limits and had a little better results, here are screen shots from that test.
We are making a few other adjustments on the system now, I will save the actual output files as you requested and attach the results when we get them, hopefully later today.
-Dan
That looks much better! It appears that you should use smaller commanded acceleration and deceleration values to track better at the beginning of motion and help prevent overshoot at the end.