Introduction
Magnetostrictive sensors are commonly used in high-performance motion control applications. The sensor
requires time to complete the measurement, and two primary methods exist for determining when to take the measurements. The non-synchronized method simply takes the measurements as fast as the sensor can measure. The synchronized method synchronizes the loop time of the controller with the measurement cycle of the transducer. This means the position samples are taken at a known interval relative to the controller, which results in much smoother velocity calculations. Good velocity measurements mean the Differential Gain and Double Differential Gains can be applied much more successfully, which helps the tuning of difficult systems.
Delta always recommends synchronized SSI sensors and discourages using non-synchronized SSI sensors.
Transducer Comparison
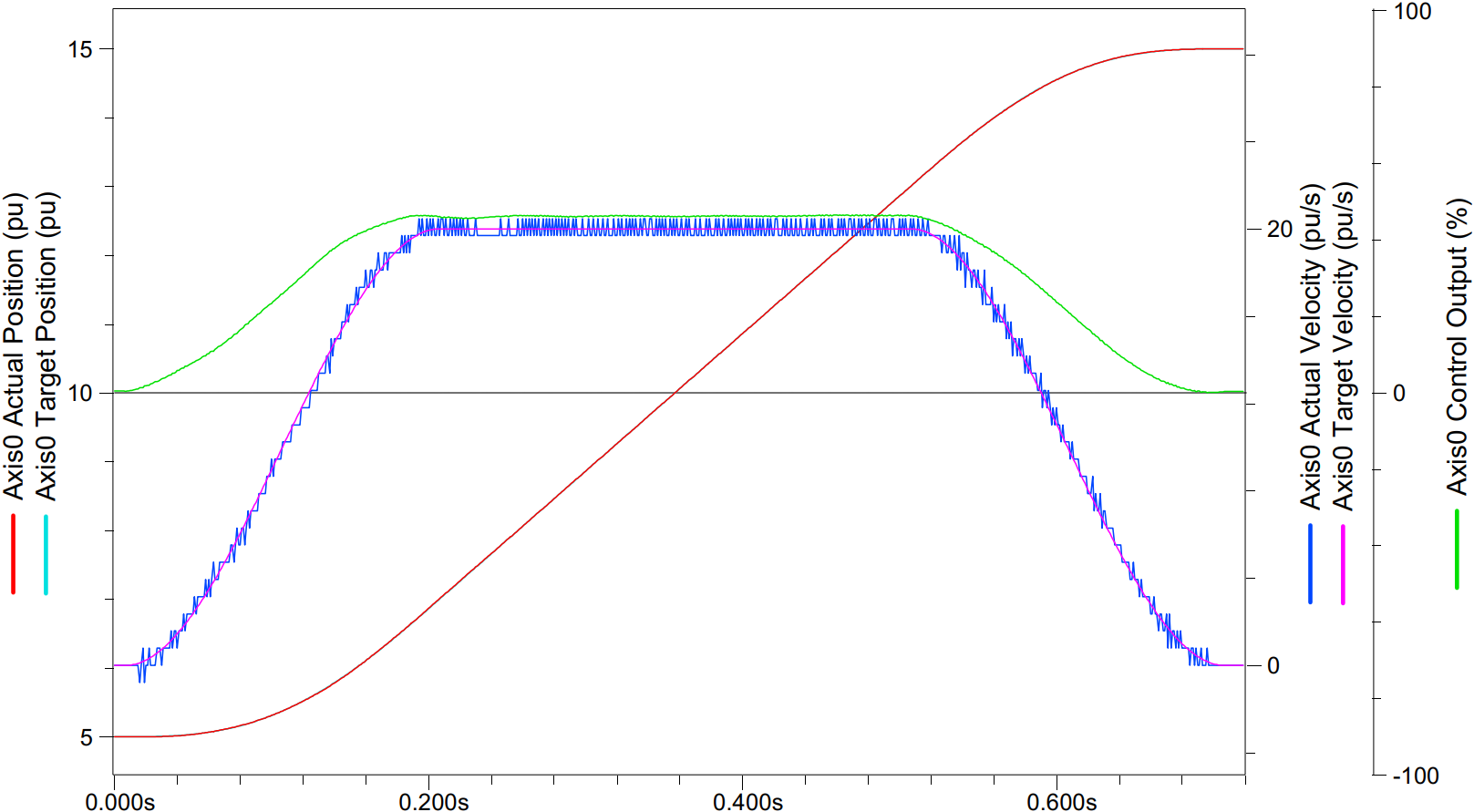
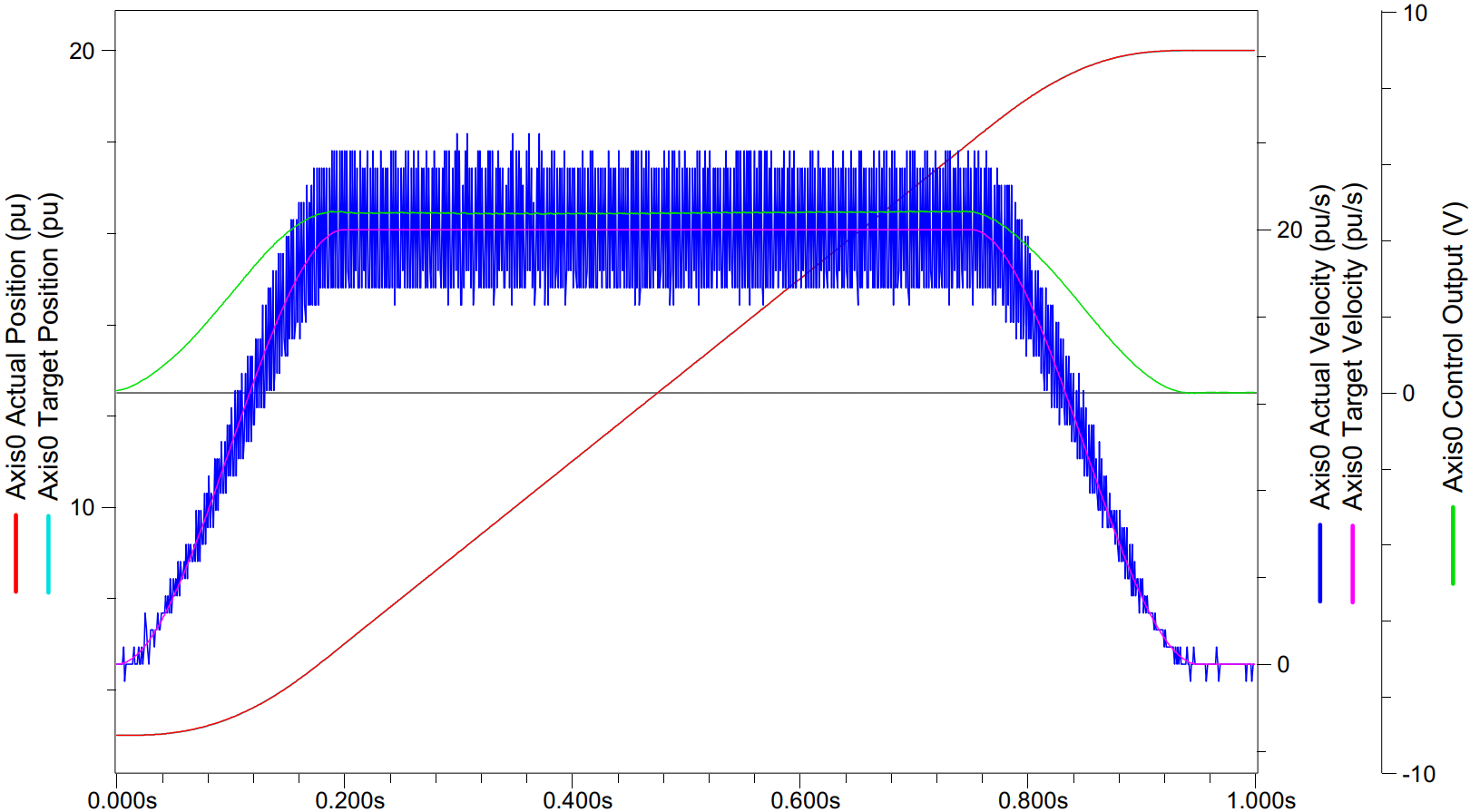
A magnetostrictive transducer was tested in two different configurations, synchronized and non-synchronized. At a constant velocity of 20 in/sec, the non-synchronized transducer reported velocities ranging from 16.535 to 23.622 in/sec as shown in Figure 1. This is a spread of 7 in/sec. The synchronized transducer reported velocities ranging from 19.685 to 20.472 in/sec as shown in Figure 2. This is a spread of 0.787 in/sec, which, given the position resolution of this particular sensor (20 µm), is the smallest velocity resolution possible. The synchronized transducer has only 11% of the velocity variation of the non-synchronized transducer!
Non-Synchronized SSI Magnetostrictive Sensor
Synchronized SSI Magnetostrictive Sensor