positioning accuracy<0.9 mm
MAX SPEED=2000mm/s acceleration=300mm/S2 Deceleration=300mm/S2
In this case,How much speed accuracy is required to ensure positioning accuracy? What is the minimum allowed stable speed?
positioning accuracy<0.9 mm
MAX SPEED=2000mm/s acceleration=300mm/S2 Deceleration=300mm/S2
In this case,How much speed accuracy is required to ensure positioning accuracy? What is the minimum allowed stable speed?
The accuracy of the speed and position are related. The error in position is the integral of the error in speed over time.
The error in position is the double integral of acceleration over time.
However, the feed back is position. It is the positions that are important. Velocity and acceleration are derived from the feed back positions.
Measuring speed is done by using the difference in position over 1 millisecond. If the change in position is 1 micron over 1 millisecond the speed is 1 mm/s
BTW, your ramps are very slow. It will take 6.666 (2000/300) seconds to get to full speed. You better have extremely long cylinders.
There is no minimum stable speed but there is a minimum resolution on the measurement of the speed.
My idea is this
S= 1/2at^2
S=0.9 /3
0.9-----positioning accuracy 3------- The resolution is at least 3~5 times the precision
0.3=1/2at^2
0.3=1/2a*(v/a) ^2
0.3=0.5* v ^2 /a
0.3=0.5* v ^2 /300
V=13.41mm/s
V------Minimum controllable velocity
Is it right?
How much should the speed precision be? I have no idea.
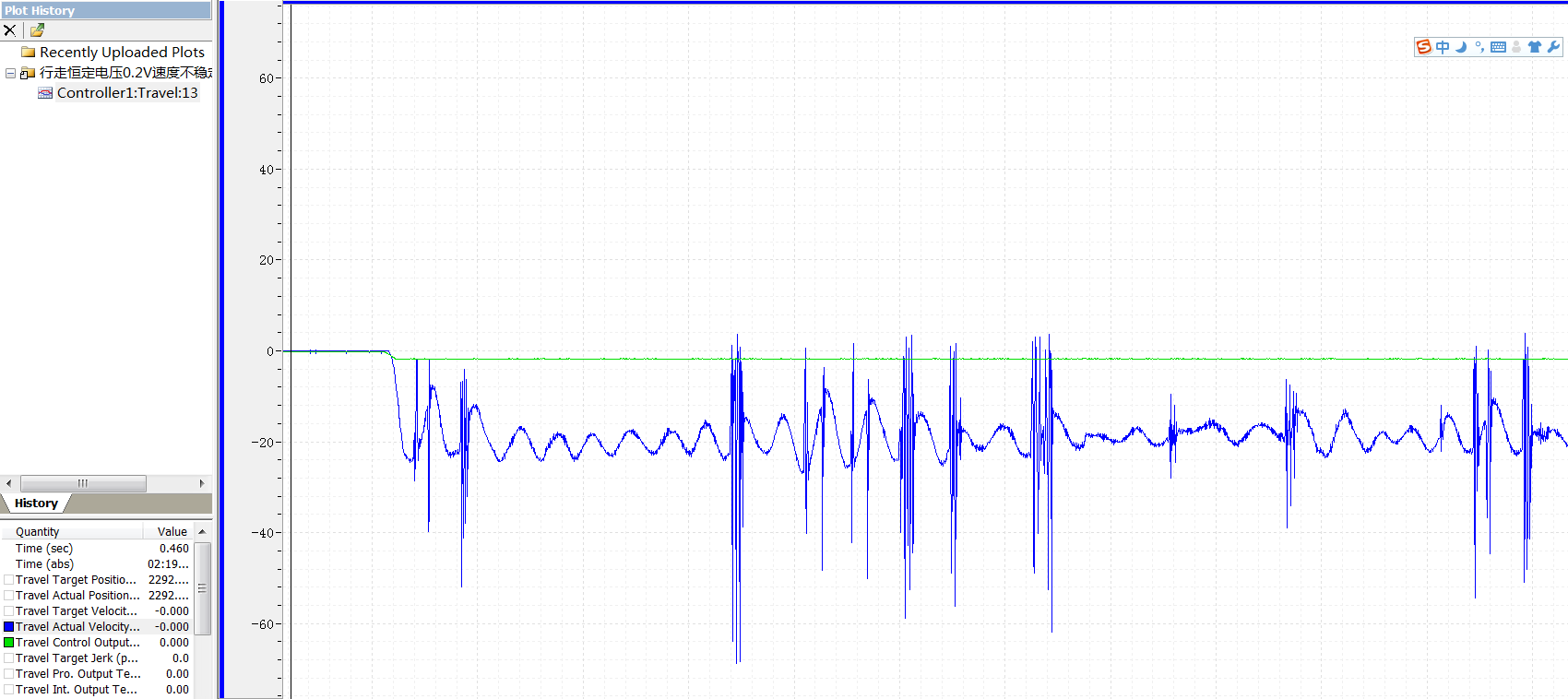
In my project, When I set the control output to constant 0.2V,velocity is up and down fluctuation.
see attach
I this case
I think achive 0.9mm accuracy is very difficult
What should I ask for hydraulic and Mechanical Engineers?
What kind of precision should hydraulic and mechanical have to be achieved, electricity can be controlled
0.2V Constant velocity Monitor.rmcplots (1020 KB)
You should be able to control to much lower speeds than 13.41
The plot file tells me a lot but you didn’t capture the time on the bottom. I can’t compute the frequency of the slower oscillatons.
I see you have already done the slow speed test as suggested in your other topic. Good.
It looks like your cylinder is not a servo cylinder. There are too many spikes in the velocity.
This is the result of stick-slip.
You need to ask your cylinder supplier why there are rough spots in the cylinder?
They did not do a good job of honing or polishing the inside of the cylinder.
The slower oscillations seem to be at a very low frequency.
This may be caused by too much mass on a long or small diameter cylinder.
Most likely the slow oscillation is caused by hose between the valve and cylinder. The rough spots excite the oscillations.
You should be able to control to much lower speeds than 13.41
The plot file tells me a lot but you didn’t capture the time on the bottom. I can’t compute the frequency of the slower oscillatons.
I see you have already done the slow speed test as suggested in your other topic. Good.
It looks like your cylinder is not a servo cylinder. There are too many spikes in the velocity.
This is the result of stick-slip.
You need to ask your cylinder supplier why there are rough spots in the cylinder?
They did not do a good job of honing or polishing the inside of the cylinder.
The slower oscillations seem to be at a very low frequency.
This may be caused by too much mass on a long or small diameter cylinder.
Most likely the slow oscillation is caused by hose between the valve and cylinder. The rough spots excite the oscillations.
Thanks for your reply
I have upload the 0.2V Constant velocity Monitor.rmcplots
In this project, the driver is using a hydraulic motor. If it is a hydraulic motor, what is the cause of it?
There is no minimum stable speed but there is a minimum resolution on the measurement of the speed.
For the positioning accuracy requirements of 1mm, How much is a minimum resolution on the measurement of the speed?
The question is not clear.
hydraulic motors have lots of static friction.
You should also check the null on the valve so the motor will move in both directions equally.