The VCCM equation is handy for computing the maximum steady state speed of a hydraulic servo system. In reality the value calculated for the maximum steady state velocity must be reduced some what because the supply pressure usually drops during motion.
v_{ ss }=K_{ vpl }\sqrt { \frac { P_{ s }\cdot A_{ pe }-F_{ l } }{ A_{ pe }^{ 3 }\cdot (1+\frac { { \rho }_{ v }^{ 2 } }{ { \rho }_{ c }^{ 3 } } ) } }
Where: v_{ ss } is the maximum steady state velocity K_{ vpl } is the valve flow constant of the powered land or edge computed from the valve specifications. P_{ s } is the supply pressure A_{ pe } is the area of the powered or pushing side of the piston. F_{ l } is the load force. Subtract if opposing motion, add if aiding motion. { \rho }_{ v } is the ratio of the flow constant of the power land to the exhausting land. Normally valves are symmetrical so { \rho }_{ v }=1 { \rho }_{ c } is the ratio of the piston’s pushing area to the side that is exhausting.
Since the maximum steady state speed is reached when the control signal is at 100% the VCCM equation is necessary to calculate the open loop gain of the system which will have units of velocity per % control output. Notice that v_{ ss } is normally be different when extending and retracting so a model and controller should account for different open loop gains for motion in direction
{ K }_{ vpl } is the valve flow constant of the powered land or port. If the piston is extending then the valve port flowing to the cap side of the cylinder is the powered land or port. { K }_{ vpl } is calculated using the specifications from the valve manufacturer. The manufacturers rate servo quality valve at 1000 psi or 70 bar or 7MPa which is actually about 1015 psi pressure drop across the a and b ports. The pressure drop across one port is 35 bar.
We have a Bosch Rexroth 4WRPEH 10 C4 B100L-2X/G24K0/A1M part # 0811404803 boschrexroth.com/country_uni … 010-03.pdf
The 4WRPEH valve we have is rated at 100 liters per minute ( 26.4 gpm ) and the pressure drop across each edge is 35 bar or about 1000 psi. What we want to do is calculate the valve flow constant { K }_{ v }. The general equation is { Q }_{ rated }={ K }_{ v }\cdot \sqrt { \Delta { p }_{ rated } }. For our valve { Q }_{ rated }=100lpm and { \Delta { p }_{ rated } }=35bar. Remember that the pressure drop is across one land or edge of the spool, not the whole valve. Rearranging the formula to calculate { K }_{ v } we get { K }_{ v }=\frac { { Q }_{ rated } }{ \sqrt { \Delta { p }_{ rated } } }
solving for { K }_{ v } we get an answer with strange units: { K }_{ v }=\frac { 100lpm }{ \sqrt { 35bar } }= 8.909\cdot { 10 }^{ -7 }\frac { { m }^{ 3.5 } }{ { kg }^{ 0.5 } }
While this answer is technically correct it isn’t intuitive and it is easy to make errors with these strange units. Therefore I recommend that whenever you use a valve constant you substitute the equation for the valve constant because it is more intuitive and it is easier to keep the units straight.
In most cases the the flow constant for each edge of the are the same but sometimes there are 2:1 spools as indicated on page 4/12 midway down the page. In this case { K }_{ v } will changed depending whether the piston is extending or retracting and the ratio of the powered land or edge to the exhausting land, { \rho }_{ v } will be 2.
{ K }_{ vpl } is an important value in modeling. Since { K }_{ vpl } is used to calculated the maximum steady state speed and 100% control signal, { K }_{ vpl } is also used to calculate the open loop gain which will have units of velocity per %control signal or velocity per volt or velocity per ampere.
Ok, so I wanted to work out an example to get a better understanding of how this works.
To keep thing simple I chose the following system parameters
Cylinder 100mm diameter bore / 56mm rod.
System Pressure 70 bar
Valve - same as your example above.
Opposing force 500 N
So I plug all this into the v_{ss} equation and let Mathcad handle my units and I get: v_{ss}=259.684\cdot \frac{mm}{s}
But, I purposly picked a pressure drop at the exact valve rating (100LPM at 35bar per land) so if I do things the dumb old way to figure out the speed of the cylinder I get
This is confusing to me. v_{dumb} is ideal, with no opposing force and no consideration of the cylinder area ratio. I thought v_{dumb} would be higher than v_{ss}. Am I missing something? Should the P_s in the equation actually be system pressure divided by 2 because of the 2 lands in the valve?
Good example and your math is correct.
You don’t think that the valve can flow more than 100LPM.
Hint, what is the steady state pressure of the power end ( cap end ) of the cylinder?
I’m hoping that was a rhetorical question… Of course the valve can flow more than 100LPM. That’s one of the hardest things to explain to people, that the flow ratings for any servo or prop valve are listed at a very specific set of laboratory conditions that will not likely match any applications the valve will ever be used in. So the dumb velocity assumes that the pressure drop across both lands of the valve will be identical. the Vss version accounts for the different pressure drops on the two different sides of the valve and also the fact that there will always be less flow on the rod side of circuit.
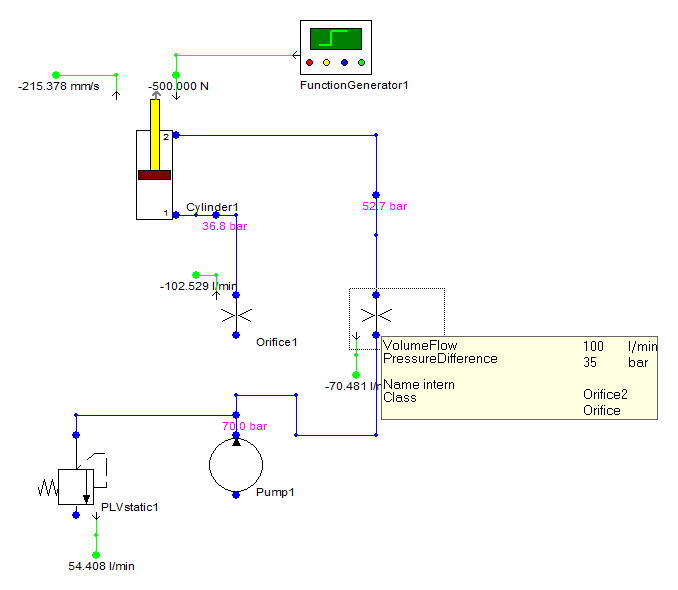
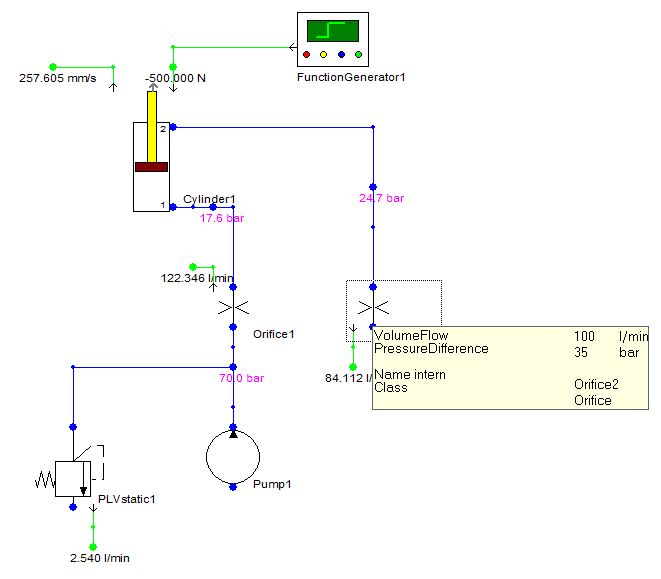
The pressure on the powered end is: { P }_{ pe }={ P }_{ s }-{ \left( \frac { { v }_{ ss }\cdot { A }_{ pe } }{ { K }_{ vpl } } \right) }^{ 2 }=17.59{bar}
so obviously the pressure drop is: { \left( \frac { { v }_{ ss }\cdot { A }_{ pe } }{ { K }_{ vpl } } \right) }^{ 2 }=52.41{bar}
which is much higher pressure drop than the rating so it makes sense the valve would flow more than the rated value.
Most of the time the valve flow constant is the same for both ports of the valve. This eliminates the need for a spool flow coefficient ratio. The cylinder ratio can also be eliminated if one doesn’t mind having 2 different equations. On for extending and one for retracting. { v }_{ ss }={ K }_{ v } \sqrt { \frac { { P }_{ s }\cdot { A }_{ cap }-{ F }_{ l } }{ { A }_{ cap }^{ 3 }+{ A }_{ rod }^{ 3 } } } for extending { v }_{ ss }={ K }_{ v }\sqrt { \frac { { P }_{ s }\cdot { A }_{ rod }+{ F }_{ l } }{ { A }_{ cap }^{ 3 }+{ A }_{ rod }^{ 3 } } } for retracting
In the above formulas the load force is assumed to be pushing against the rod in while extending and retracting so the force load is subtracting while extending and added while retracting. This is the case when the rod is pushing a cylinder up. If the cylinder is pointed down the sign signs before the force load would need to be reversed.
Newton didn’t include flow in his laws of motion. On some hydraulic forums there have been some bitter debates about “flow makes it go” vs force.
Newton’s first law basically says a object will maintain a constant velocity until an unbalanced force acts on it. When there is an unbalanced force then the second law applies. In hydraulics a cylinder will accelerate according to Newton’s second law until the sum of forces are 0 or balanced. At this point the maximum velocity is reached and the acceleration is 0. The formula for this can be expressed as a force balance
So start with the force balance m\cdot \frac { dv }{ dt } ={ P }_{ a }\cdot { A }_{ a }-{ P }_{ b }\cdot { A }_{ b }-{ F }_{ l }
To keep things simpler I am including all other forces like friction in the load force term
Now some substitutions are required starting with {P}_{a}-{P}_{s}-\Delta {P} \\
Q={ K }_{ v }\sqrt { \Delta P } \\
\Delta P={ \left( \frac { Q }{ { K }_{ v } } \right) }^{ 2 } \\
\Delta P={ \left( \frac { A\cdot v }{ { K }_{ v } } \right) }^{ 2 }
Assuming the actuator is extending and the a port and a side are the powered side {P}_{a}={P}_{s}-\Delta {P}_{a} {P}_{a}={P}_{s}-{ \left( \frac { A_{a}\cdot v }{ { K }_{ v } } \right) }^{ 2 } {P}_{b}={ \left( \frac { A_{b}\cdot v }{ { K }_{ v } } \right) }^{ 2 }
If the equation above is solved for v the result is the VCCM equation
Use the formulas above to substitute into the force balance equation m\cdot \frac { dv }{ dt } =\left( { P }_{ s }-{ \left( \frac { { A }_{ a }\cdot v }{ { K }_{ v } } \right) }^{ 2 } \right) \cdot { A }_{ a }-{ \left( \frac { { A }_{ a }\cdot v }{ { K }_{ v } } \right) }^{ 2 }\cdot { A }_{ b }-{ F }_{ l } m\cdot \frac { dv }{ dt } ={ { P }_{ s }\cdot { A }_{ a } }-\left( { A }_{ a }^{ 3 }+{ A }_{ b }^{ 3 } \right) \cdot \frac { { v }^{ 2 } }{ { K }_{ v }^{ 2 } } -{ F }_{ l }
At constant velocity the force due to acceleration term is 0. Collecting terms yields: { { P }_{ s }\cdot { A }_{ a } }-\left( { A }_{ a }^{ 3 }+{ A }_{ b }^{ 3 } \right) \cdot \frac { { v }^{ 2 } }{ { K }_{ v }^{ 2 } } -{ F }_{ l }=0
I use DSHplus, I have used DSHplus to do some simulations, but I am not for sure my simulation result. The VCCM equation is a good example for veryfing my result.