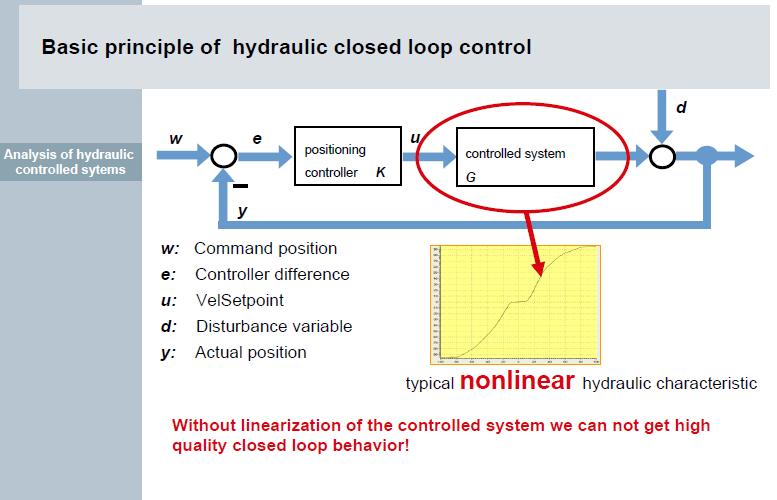
If the valve is non-linear, then certainly, using valve linearization is the key to achieving good performance. However, the key to great performance is usually to use a linear valve.
Here is my short explanation:
If you want to get great control and make your life easy, get a linear valve! If you need more complications in your life, get a non-linear valve!
Here is my long explanation:
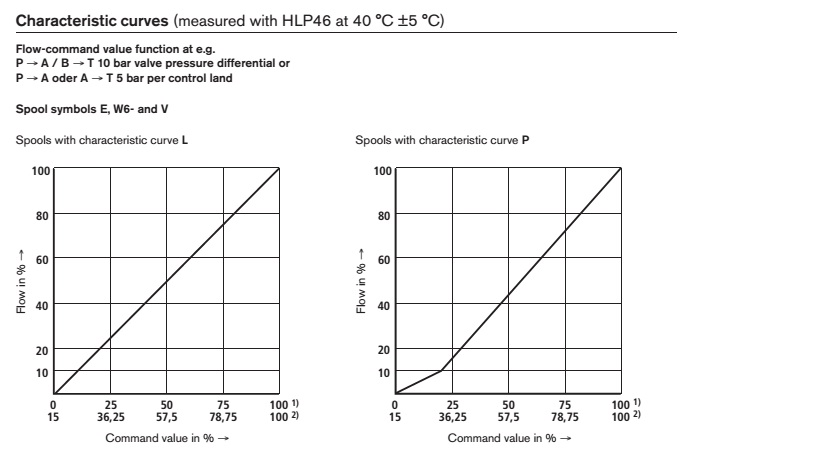
Historically, non-linear valves have been used because the flow gain is lower around zero volts, allowing for very fine control at low speeds, or for very fine pressure control, while still providing high flow at larger voltages. For example, if a manually-operated valve is used, it is obvious that it is much easier to control hydraulics with a non-linear spool as shown in the images above. However, in the modern era, we have high-resolution position sensors, high-speed controllers, and advanced control algorithms. These typically make it completely unnecessary to use non-linear valves.
A linear valve makes the set up process very easy. Since it exhibits the same system model over the entire range of motion, auto-tuning can be accurately employed. Simply auto-tune it and you are done! The auto-tuning in RMCTools offers a slider bar so you can choose the optimum set of gains while moving the system.
When using controllers with a high update rate, and using accurate sensors, linear valves provide great control around zero.
A non-linear valve requires more setup. It is nearly impossible to accurately auto-tune a non-linear valve, because any system exhibits a time delay and the non-linear adds to that a changing system model. Accurately ferreting out which motion effects result from the delay or from the system model is extremely difficult. Therefore, non-linear valves need to be manually tuned, even when valve linearization is used. In addition, the system of course needs to be linearized, which requires entering yet more information that could be simply skipped were a linear valve used.
Besides a changing system gain, a non-linear valve will exhibit a non-linear time delay as the spool shifts. For very critical, high-speed control containing high frequencies, this causes additional non-linearities that make optimal tuning more difficult.
However, there are a couple of cases in which non-linear valves may be useful:
- Applications that require both very high velocity and fine pressure control. However, most of these applications are presses, where the velocity control is not so critical, so it actually is more cost-effective to use a large inexpensive valve for the velocity, and a small high-performance valve for pressure (smaller again means less expensive).
- Applications where cost must be kept very low. Lower-cost valves nearly always non-linear. However, these valves will never provide great control, so if you need great control, this is not an option.
The RMC does have valve-linearization if needed.
As for comparing to Siemens or any other controller, usually our customers find that the RMC speaks for itself. Setting it up and tuning it is quite straight-forward, especially with a linear valve. However, the RMC150 and RMC75 have many advanced tuning features beyond the basic PID gains and feed forwards. The Output Filter reduces the effects of quantization, allowing the derivative (D) gain to be used to its full potential. We find that this is a great asset in many systems. In addition, for systems that tend to oscillate, the RMCs include a double derivative (DD) gain. The DD gain operates on the acceleration, which includes huge quantization errors when calculated from the position sensor. Therefore, the RMCs have a model-based filter to calculate an accurate acceleration.
In addition, when using an RMC, you get free technical support from Delta, where it is very easy to get in touch with an expert immediately, and there is even 24/7 support.
As for how valve-linearization works, the control output signal is simply converted with the inverse of the valve’s flow to voltage diagram. This results in the valve appearing linear to the control algorithm.
If the valve spool is also overlapped, then it will never give great control. The RMC has advanced compensation techniques for this as well, and it may very well provide suitable control if the positioning requirements are not real high, but never will it provide great control, especially for motion that needs to change direction quickly and smoothly.