Project requirements:
velocity: 2 ~ 500mm / s continuously controllable。
Some people think that it’s difficult to Achieved ,because high cylinder and slow cylinder material is different 。
Is it right?
Project requirements:
velocity: 2 ~ 500mm / s continuously controllable。
Some people think that it’s difficult to Achieved ,because high cylinder and slow cylinder material is different 。
Is it right?
We regularly achieve both speeds on our hydraulic systems here. For example, we have a cylinder with a 2 inch ( 50.8 mm) bore, and 24 inch ( 609 mm) stroke, and it is easy to achieve very slow speeds, such as 2 mm/sec, high speeds, such as 50 in/sec (approximately 1.3 inch/sec).
A well-designed hydraulic system should be able to do that easily. This means that the valve should be located as close as possible to the cylinder, preferably on the cylinder. A servo-quality valve should be used, and the position feedback should be of high resolution. The cylinder should be designed with good-quality seals. If the system is not well-designed, then at low speeds, the static friction of the cylinder can cause a slip-stick action that creates jerky motion.
An important question when requiring a very slow speed is how long the measurement interval is. For example, do you need 2 mm/s over 1 s, 0.1 s, 1 ms, or 1 μs? This can drastically change to system requirements, since achieving a slow speed measured accurately over a time of 0.1 second is much easier than over 1 μs. Usually, our customers just need the velocity to be “reasonably smooth”, and any well-designed hydraulic system can do that.
thank you for your reply。
e.g.
the min speed= 2mm/s max speed=500mm/s
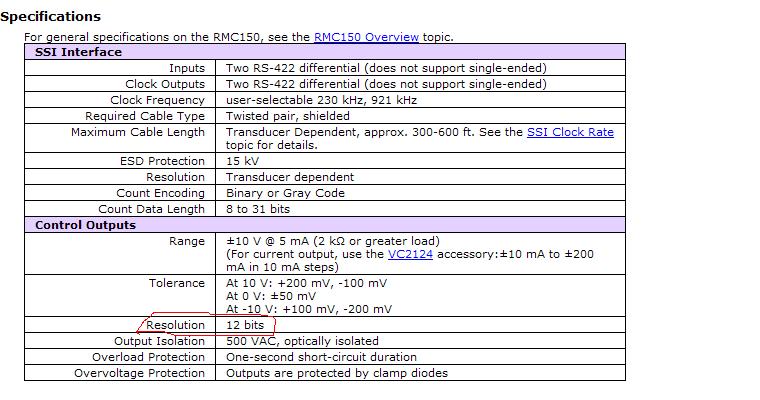
500mm/s Corresponding voltage 10v,that means 2mm/s Corresponding voltage=(2/500)*10=0.04v
qestion 1:
I want to know Whether the resolution of the analog output can meet the requirements? the resolution of the ssi module analog output=10/2048=0.0049?
qestion 2:about measurement interval
Project requirements :
speed: 2mm/s Amplitude :1.8mm frequency: 10hz sine
what should i pay attention ??
Answer 1: Yes, the analog output can meet the requirements for the slow velocity, because in closed-loop control, the analog output is continuously changing at a frequency of 1 kHz. The system response is much less than 1 kHz, so the analog output is basically averaged and results in a very well-controlled velocity.
Answer 2: I think the standard settings in the RMC will work just fine. These are very typical requirements that the RMC can easily meet. Just follow proper system design, such as high-resolution feedback, a servo-quality linear valve with a zero-lapped spool, the valve mounted on the cylinder or as close to the cylinder as possible.