I have an actuator setup with a dual coil servo valve that i want to be able to control both coils individually for fault tolerance and monitoring. What would the best way to setup the axis to run off both coils? I thought about using gearing to run both axis off a single master, but i was confused that it might be easier to use programs to command two separate axis simultaneously? I’d also like to be able to setup some logic to detect and correct for coil failures.
I know that this is much simpler by setting up the coils to be wired in parallel, but unfortunately my requirements wont allow for that.
Has anybody done this before?
I suggest using a normal axis, and also an output-only axis (a control axis with no feedback). Then, you can make a user program that always runs and copies the output of the normal axis to the output-only axis using a Direct Output command. That way, you will have two Control Outputs. Each one can be run into a channel of a voltage-to-current converter. To verify that the coil is intact, you could use two analog inputs on the RMC to measure the voltage on the output of the voltage-to-current converter. This will only work if the voltage is always in the range (-10,10) volts, otherwise you will need a resistor divider.
Will this work in your situation?
-Jacob
Thanks for the input Jacob. I think this will work for my purpose. When i setup the output only axis, im assuming you mean a control axis with no loop?
Correct, an output only axis is a control axis with no control loop.
There will be a one-loop delay between the main axis and the other axis. To prevent this, you could set up an Outer Loop axis (which has no physical Control Output), and two output-only axes. Then, both Control Outputs will always have the same value.
Gotcha, I am interested in keeping the outputs in sync. Do you have an example of using the outer loop (im assuming cascading outer loop) to control two output only axis?
Basically, all you need is a user program like the one below, and make sure it’s always running:
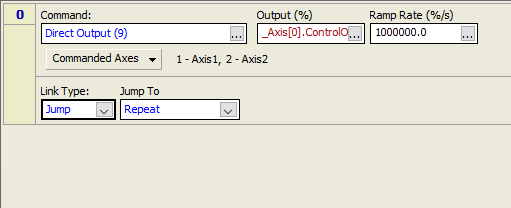
This topic describes what is required to make sure a user program always runs:
https://forum.deltamotion.com/t/make-a-user-program-always-run/436
Perfect! I think i have it working now. Thanks Jacob!