So, I have a hydraulic cylinder with RMC75E. There is a compression load cell where the rod of the cylinder applies load. I currently have a simple sine wave applied and trying to tune it better using PID. I don’t have a position sensor and I read that it will be harder to tune it with only load cell.
The question I have is that how much accuracy (in tuning i.e., actual_force_value / target_force_value) is achievable with just a load cell? I have been trying to tune it up but isn’t making progress. So, I just wanted to know if i should keep trying. Also, please feel free to give some advice on how to tune it for this case.
Anne1,
In general, with a well-designed system, good wiring, and a somewhat static load, it should be reasonably easy to achieve a static 1% accuracy, and in a sine wave a few percent should easily be achievable. However, it very much depends on the system. Can you provide the following info, which will help us provide more assistance?
- Cylinder size
- Valve part number
- Is the valve mounted on a cylinder or remotely, and if so, how far?
- How is the load cell wired?
- Describe the load
- What frequency sine wave do you need to apply?
- Could you attach a plot of current behavior?
-Jacob
Jacob,
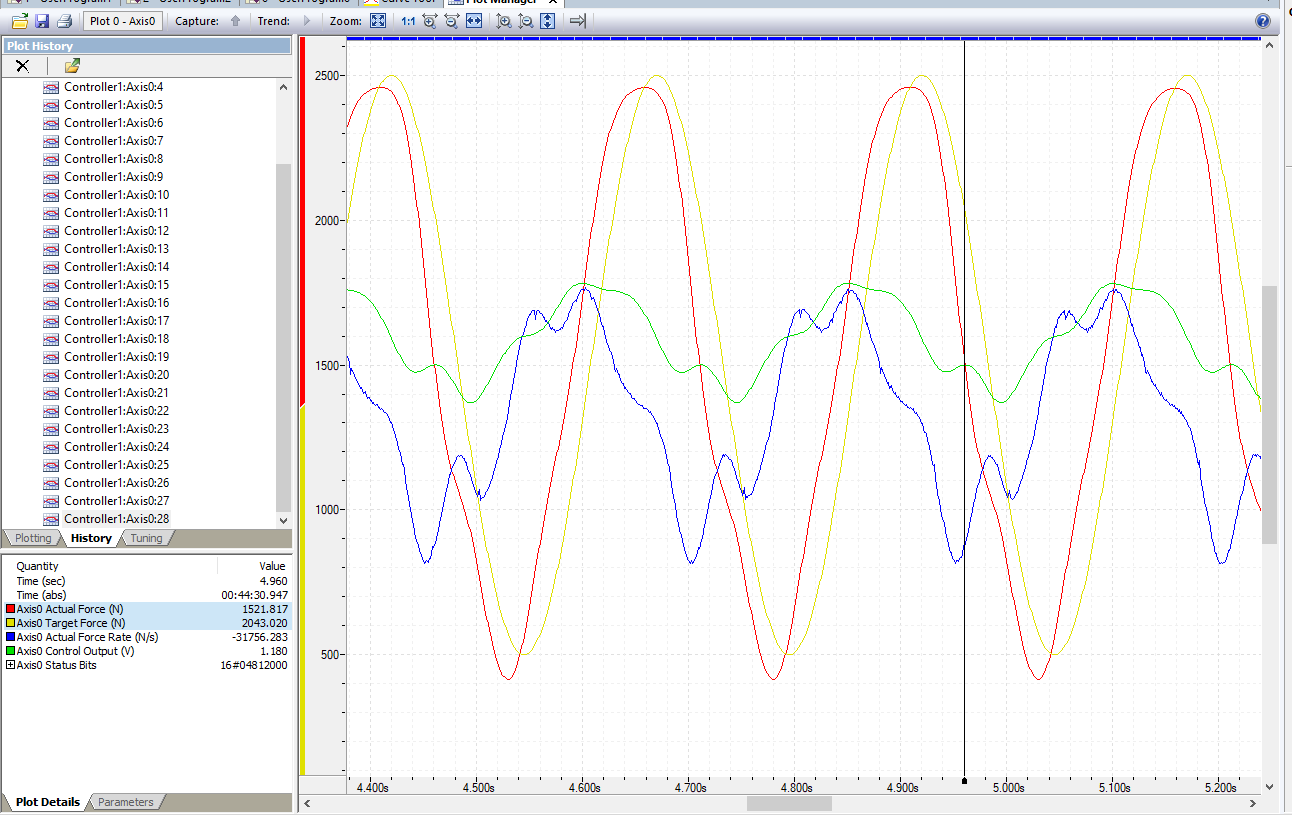
At the moment I am doing a simple sine wave which is depicted below. Once I tune this up I would like to apply some more dynamic load, siezure load, and some wear load (basically sine wave but load keeps increasing as time goes).
Here is some info on my system:
-
Cylinder size: about 12", rod diameter 1" and its a 1HASM000250618 Parker ‘Fast’ Series Hydraulic Cylinder
-
SE20HAALBVA2.5 Parker High Performance Servo Valve
-
The servo valve is mounted on the cylinder
-
Please see attached image
-
Load is not high at all (500 - 2500 N). For starters I’m doing it with low frequency (4 Hz) and ideally would like to go as high as 100 Hz (if possible with my system?). I am attaching some of the plots I’d like to apply once I tune the system up.
-
the higher the better, upto 100 Hz
-
Current behavior:
Apperently, I can’t attach more than one image at a time. I’ll add teh future loads in the subsequent replies
Thanks!
Anne1

Anne,
Your system design appears quite good, at least at first glance. Are you using a signal conditioner for the load cell? What are its filtering settings set to? It kind of looks like we could be dealing with too much filtering, since the signal is so smooth.
Also, I see the Actual Force is leading the Target Force. This can be caused by too much Rate Feed Forward.
For higher frequencies, normal tuning doesn’t work. For that, we use adaptive amplitude control, which is described here: https://forum.deltamotion.com/t/adaptive-amplitude-offset-and-phase-control-for-waveforms/208
-Jacob
Jacob,
I’m using Omega’s DRC4710 signal amplifier. According to its data sheet, it uses 2 pole filtering.
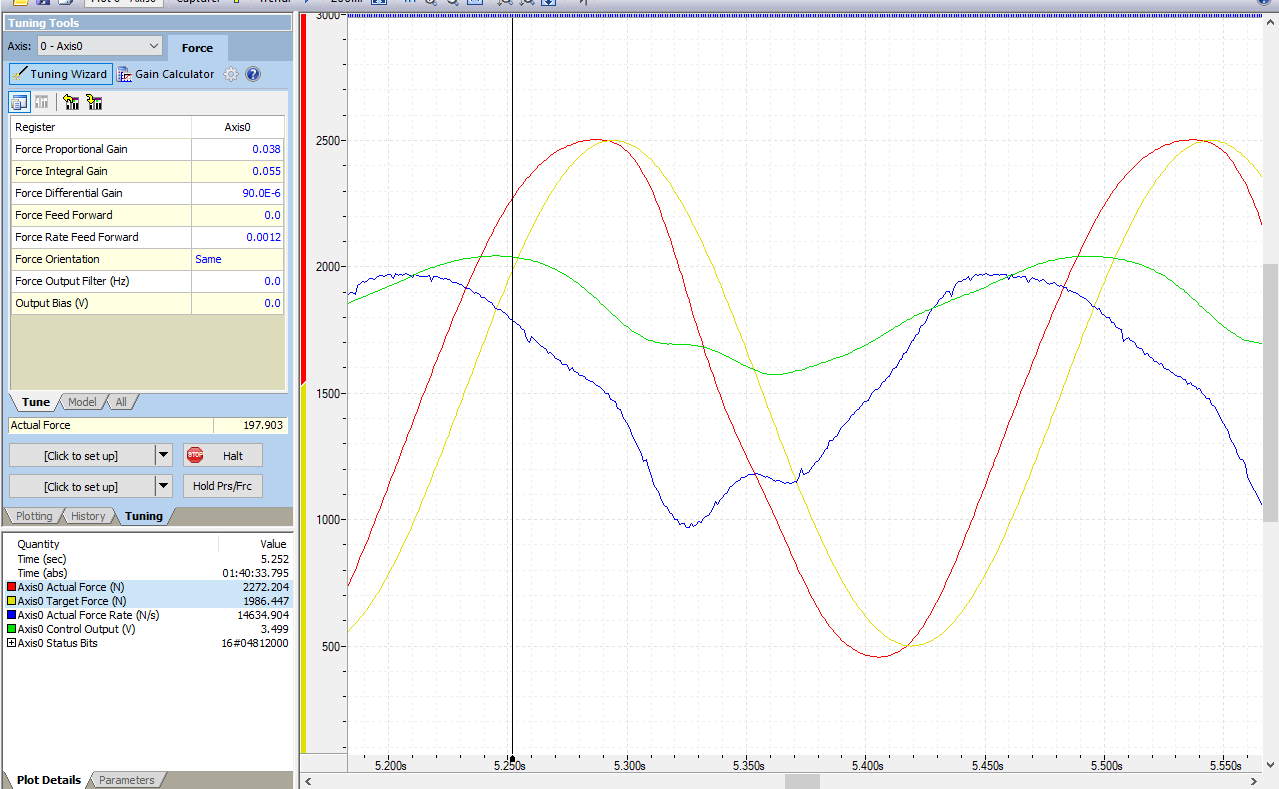
Also, I played around with the tuning values further and here is what I have now:
Anne,
The datasheet for the signal conditioner says DC to 10Hz. That would be the source of the problem. You will need to get a signal conditioner that goes up the hundreds of Hz on the filtering. We have some recommendations here: https://forum.deltamotion.com/t/load-cells-and-signal-conditioners/109
We have used the Interface Force SGA here at Delta, and it has worked very well, but it isn’t easily DIN rail mountable.
-Jacob
Jacob,
DSCA38-01 has a banwidth of 3kHz. Do you think it works fine for our purposes? It won’t add too much noise?
Thanks,
Anne
I think it will be fine. If you need more filtering, you can probably use the RMC’s filter.
-Jacob
We have used the ISG ISOLATED DIN RAIL MOUNT SIGNAL CONDITIONER from Interface with good luck. it has an adjustable filter 1-1kHz.
We also have a bunch of the Dataforth DSCA signal conditioners working well at a customer. I left them as purchased and made all my scaling and offsets in the Delta Controller. Easier for replacements down the line.
Also, adaptive tuning has worked very well for us in the past.
1 Like
ndzied1,
Great. I have decided to go with Dataforth DSCA as it’s cheaper compared to Interface signal conditioner.
I have never really done any adaptive tuning. @Jacob_Paso shared a link on adaptive amplitude control. I’m a very beginner in Delta RMC controller. So I’m trying to figure out how to implement that into my project. is there a beginner friendly info on it?
Thanks,
Anne
We have a webinar on testing that includes a portion on Adaptive Amplitude. See below:

2 Likes