Introduction
In motion control applications that require redundant motion controllers, each controller must be connected to the feedback, such as a position sensor, and the actuators, such as a proportional valve. This topic describes how to connect separate redundant motion controllers to each and switch the control between each on the fly, also known as ‘hot standby’.
Switching Feedback between Controllers
Some position transducers can be purchased with two outputs, and one output can be run to one controller and the other output to another controller. Most sensors with analog output, especially voltage output, can be wired to both controllers. Each controller will receive the sensor data all the time, and will only use it when it needs to control the system.
Switching the Actuator between Controllers
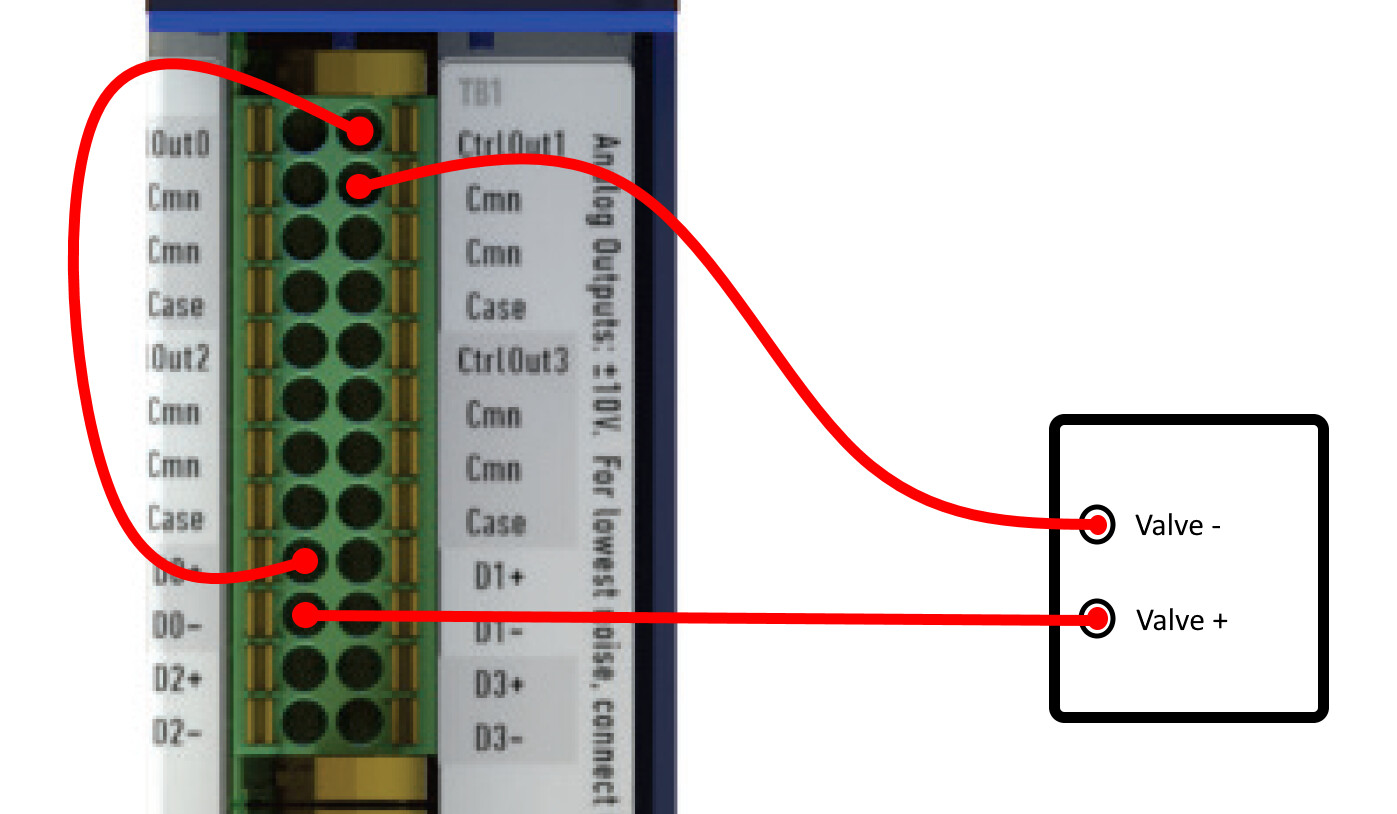
One method of connecting the Control Outputs of both RMC’s to one actuator is to use a discrete output, which operates as a switch. For example, define a discrete I/O point on the CV8 to be an output. Then, connect the analog Output + signal to one side of the discrete output. Connect the other side of the discrete output to the actuator. Do the same on the other RMC. When operating, make sure both discrete outputs are not on at the same time. If the discrete output is also defined to be an Enable Output associated with the axis, then the discrete output will automatically turn off when the axis is disabled. When enabling an axis, the Enable Output will turn on (the behavior is different on the 75 and 150). This can provide for an easy way of switching between controllers, by disabling the axis in one controller and enabling it in the other.
If a mistake occurs and both discrete outputs are on at the same time, it will likely not cause any damage anything, since the analog outputs can handle a direct short to ground without any damage, but it is uncertain what the voltage will be if both outputs are trying to drive different voltages.
To be a truly hot standby, it may be necessary to keep both discrete outputs open simultaneously for a short time when changing between controllers. It is important to make sure both Control Outputs are outputting the same voltage at that time.
Conclusion
The RMC can be used as an redundant controllers, with both controllers controlling the same actuator and receiving data from the same sensor.